Ağıllı robot əlil arabası təkmil avtonomiya və idarəetmə təklif edir
İnsan-infrastruktur qarşılıqlı əlaqəsi, elektron mühəndislik, robototexnika və süni intellekt (AI) sahələrində son nailiyyətlər köməkçi və tibbi texnologiyaların inkişafı üçün yeni imkanlar açmışdır. Bunlara həm fiziki, həm də idrak əlilliyi olan şəxslərə gündəlik fəaliyyətləri boyunca dəstək verən cihazlar daxildir.
Miçiqan Universitetinin tədqiqatçıları bu yaxınlarda Robot Əməliyyat Sistemi (ROS) əsasında idarə olunan ağıllı əlil arabası CoNav-ı inkişaf etdirdilər. ArXiv preprint serverində təqdim olunan yeni əlil arabası müvəqqəti və ya daimi olaraq yeriyə bilməyən şəxslərin həyat keyfiyyətini yaxşılaşdırmağa kömək edə bilər və onlara ətraflarında daha intuitiv və avtonom hərəkət etməyə imkan verə bilər.
“Bu iş üçün ilham, əlilliyi olan insanlar (ƏS) üçün yardımçı hərəkətlilikdə daha geniş problemdən qaynaqlanır” dedi qəzetin baş müəllifi Vineet Kamat Tech Xplore-ə.
“Hərəkətlilik müstəqil həyatda, sosial iştirakda və ümumi həyat keyfiyyətində əsas rol oynayır. Elektrikli əlil arabaları (PWC) bir çox istifadəçilər üçün hərəkətliliyi yaxşılaşdırsa da, onlar hələ də mürəkkəb mühitlərdə naviqasiyada çətinliklərə səbəb olan əməliyyat problemləri yaradırlar.”
Keçmişdə hazırlanmış əlil arabalarının əksəriyyəti ya tam avtonomdur, ya da yalnız istifadəçilər tərəfindən əl ilə idarə oluna bilər. Bu həllərin hər iki növü öz məhdudiyyətlərinə malikdir, avtonom əlil arabaları tez-tez dinamik mühitlərdə zəif işləyir və əllə idarə olunanların hərəkət qabiliyyəti zəif olan insanlar üçün idarə edilməsi çətin olur.
Miçiqan Universitetinin komandası mövcud həllərin çatışmazlıqlarını aradan qaldıra biləcək yeni ağıllı əlil arabası hazırlamaq üçün yola çıxdı. Onların hazırladıqları əlil arabası olan CoNav kreslosu istifadəçilərə onun işinə qismən nəzarət etməyə imkan verir, eyni zamanda o, ətraf mühitdə avtonom şəkildə hərəkət edə bilir.
https://googleads.g.doubleclick.net/pagead/ads?client=ca-pub-0536483524803400&output=html&h=188&slotname=2793866484&adk=1121470953&adf=746485419&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&lmt=1738734970&rafmt=11&format=750×188&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-02-smart-robotic-wheelchair-autonomy.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTMyLjAuNjgzNC4xNjIiLG51bGwsMCxudWxsLCI2NCIsW1siTm90IEEoQnJhbmQiLCI4LjAuMC4wIl0sWyJDaHJvbWl1bSIsIjEzMi4wLjY4MzQuMTYyIl0sWyJHb29nbGUgQ2hyb21lIiwiMTMyLjAuNjgzNC4xNjIiXV0sMF0.&dt=1738734970450&bpp=1&bdt=284&idt=276&shv=r20250130&mjsv=m202502030101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1738664613%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1738664613%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1738664613%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0&nras=1&correlator=3624214276193&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=447&ady=1762&biw=1903&bih=945&scr_x=0&scr_y=0&eid=95349947%2C95344791%2C31090222%2C95347433&oid=2&pvsid=2202591203284282&tmod=350111765&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=283
“Bizim əsas məqsədimiz avtonomiya və istifadəçi nəzarətini tarazlaşdıran, istifadəçi etibarını qoruyarkən səmərəli naviqasiyanı təmin edən ağıllı əlil arabası dizayn etmək idi” dedi məqalənin baş müəllifi Carol Menassa.
“Bizim yanaşmamız bu fikrə əsaslanır ki, köməkçi mobillik tam avtonom və ya tam mexaniki proses deyil, istifadəçi və intellektual sistem arasında tərəfdaşlıq olmalıdır . Bu dövrədə insan çərçivəsi daha çox inam, istifadə üçün əlverişlilik və əlçatanlığı təşviq edərək, ƏSQ-nin gündəlik həyatı daha asan və inamla idarə etməsinə kömək edir.”
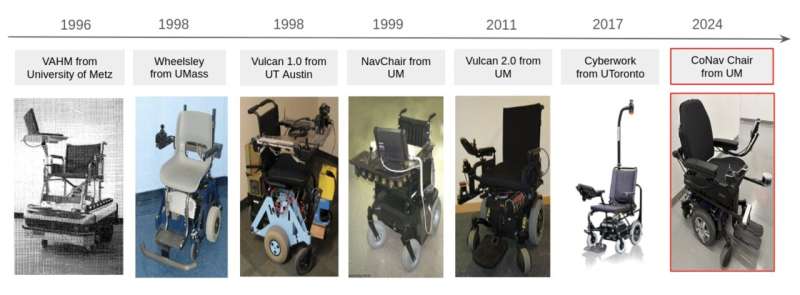
CoNav kreslosu keçmişdə təqdim edilən, mürəkkəb və dinamik mühitlərdə daha az effektiv hərəkət etdiyi aşkar edilmiş tam avtonom əlil arabalarından fərqlənir. Komandanın yeni hazırlanmış kreslosu həmişə avtonom işləmək əvəzinə, birgə naviqasiya təcrübəsini təmin edir.
“Bu ortaq nəzarəti həyata keçirmək üçün biz əlil arabası üçün ağıllı qərar qəbuletmə sistemi kimi çıxış edən model proqnozlaşdırıcı nəzarət (MPC) adlı müasir idarəetmə metodunu qəbul edirik” dedi aparıcı tələbə tədqiqatçısı və tədqiqatın ilk müəllifi Yifan Xu. “Sadə dillə desək, xərc funksiyasını düzgün tərtib etməklə, MPC həm istifadəçi girişi, həm də ətraf mühit məlumatlarına əsaslanaraq davamlı olaraq ən yaxşı hərəkəti proqnozlaşdırır.”
Miçiqan Universitetinin komandası tərəfindən hazırlanmış ağıllı əlil arabası stul quruluşu, təkərlər, joystik və müxtəlif sensorlar daxil olmaqla, müxtəlif əsas komponentlərə malikdir. İstifadəçilər joystiği hərəkət etdirərək stulun hansı istiqamətdə hərəkət etməsini istədiklərini göstərə bilərlər.
“Əlil arabasında maneələri, divarları və yolları aşkar edən sensorlar (LiDAR, kamera, IMU) da var” dedi Xu. “Bu sensorlardan istifadə edərək, o, istədiyiniz təyinat yerinə optimal yol yaradır.”

Qeyd edək ki, yeni əlil arabası adaptiv idarəetmə imkanını təklif edir. Əslində, bu o deməkdir ki, həmişə joystik vasitəsilə istifadəçilər tərəfindən verilən istiqamətləri izləmək və ya onlara tamamilə məhəl qoymamaq əvəzinə, o, bu istiqamətləri öz naviqasiya planına qarışdırır.
Bundan əlavə, əgər istifadəçilər tez-tez stulun harada hərəkət etməsini istədikləri ilə bağlı təlimat verirlərsə (yəni, stulun idarə olunmasını aktiv şəkildə idarə edir), əlil arabası yaratdığı naviqasiya planından daha çox öz girişini prioritetləşdirməyi öyrənir. Bunun əksinə olaraq, istifadəçilər joystik vasitəsilə istiqamətlər təklif etməyi dayandırdıqda, sistem təhlükəsiz və hamar naviqasiyanı təmin etmək üçün öz üzərinə götürür.
“CoNav müxtəlif unikal üstünlüklərə malikdir” dedi Kamat. “Birincisi, bu, istifadəçi səylərini azaldır, çünki ondan istifadə edən insanlar əl ilə əlil arabalarından istifadə edərkən olduğu kimi onun hərəkətlərini daim düzəltməyə ehtiyac duymurlar. Bundan əlavə, istifadəçinin niyyətlərinə əməl edərkən maneələrdən ağıllı şəkildə qaçaraq toqquşmaların qarşısını ala bilər.”
Keçmişdə təqdim edilən digər ağıllı əlil arabası dizaynları ilə müqayisədə, CoNav istifadəçilərin özlərini daha çox nəzarətdə hiss etmələri, kresloya inamlarını artırmaq və ümumi təcrübələrini yaxşılaşdırmaq üçün nəzərdə tutulmuşdur. Avtonom və əl idarəetməni birləşdirərək, kreslo naviqasiyanı daha hamar və intuitiv edir, kəskin hərəkətləri və trayektoriya düzəlişlərini azaldır.
https://googleads.g.doubleclick.net/pagead/ads?client=ca-pub-0536483524803400&output=html&h=188&slotname=2793866484&adk=1121470953&adf=1041534309&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&lmt=1738734970&rafmt=11&format=750×188&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-02-smart-robotic-wheelchair-autonomy.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTMyLjAuNjgzNC4xNjIiLG51bGwsMCxudWxsLCI2NCIsW1siTm90IEEoQnJhbmQiLCI4LjAuMC4wIl0sWyJDaHJvbWl1bSIsIjEzMi4wLjY4MzQuMTYyIl0sWyJHb29nbGUgQ2hyb21lIiwiMTMyLjAuNjgzNC4xNjIiXV0sMF0.&dt=1738734970451&bpp=1&bdt=285&idt=291&shv=r20250130&mjsv=m202502030101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1738664613%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1738664613%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1738664613%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0%2C750x188&nras=1&correlator=3624214276193&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=447&ady=3268&biw=1903&bih=945&scr_x=0&scr_y=0&eid=95349947%2C95344791%2C31090222%2C95347433&oid=2&pvsid=2202591203284282&tmod=350111765&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=3&uci=a!3&btvi=2&fsb=1&dtd=293
“İstifadəçi niyyəti və süni intellektlə idarə olunan naviqasiyanı birləşdirərək, CoNav kafedrası daha təbii, səmərəli və istifadəçi dostu əlil arabası təcrübəsi yaradır, gündəlik mühitlərdə Əlillərin hərəkətliliyini və müstəqilliyini yaxşılaşdırır” dedi Menassa.
Tədqiqat qrupu statik və dinamik (yəni, hərəkətli) maneələri əhatə edən qapalı mühitdə həyata keçirilən bir sıra real dünya təcrübələrində kafedrasını qiymətləndirdi. Onların tapıntıları çox ümidverici idi, çünki CoNav səmərəlilik, təhlükəsizlik və istifadəçi məmnunluğu baxımından həm tam avtonom, həm də əl ilə idarə olunan əlil arabalarını üstələyirdi.
“Sistem kəskin hərəkətləri azaldır, bu da istifadəçilər üçün daha təbii və rahat təcrübəyə gətirib çıxarır”, – Xu izah etdi. “Ənənəvi əl ilə işləyən təkərli kürsüləri dar yerlərdə idarə etmək çətin ola bilər, bu da yaxınlıqdakı obyektlərlə tez-tez toqquşmalara səbəb ola bilər. Bunun əksinə olaraq, tam avtonom əlil arabaları dinamik parametrlərdə maneələrlə qarşılaşdıqda bəzən donurlar. Bizim ortaq idarəetmə yanaşmamız istifadəçi daxiletməsini real vaxtda maneələrdən yayınma ilə birləşdirərək, daha az toqquşmaya və daha uğurlu naviqasiyaya səbəb olur.”
Tədqiqatçılar müəyyən ediblər ki, CoNav istifadəçilərə yalnız əllə idarə oluna bilən əlil arabalarından daha tez istədikləri yerə çatmağa imkan verir. Komandanın qiymətləndirmələri zamanı kafedranı sınayan insanlar tədqiqatçıların əlil arabasından istifadə edərkən özlərini daha rahat və inamlı hiss etdiklərini bildirdilər, çünki onlar onun hərəkətlərinə hələ də nəzarət etdiklərini və lazım olduqda onun avtonom naviqasiya imkanlarından yararlandıqlarını hiss etdilər.
“CoNav Kafedrası motor qüsurları olan şəxsləri dəstəkləmək, onlara daha çox müstəqillik vermək üçün istifadə edilə bilər” dedi Kamat. “Gələcəkdə o, sağlamlıq və reabilitasiya mərkəzlərində tətbiq oluna bilər, müvəqqəti zədələri olan və tam əllə əlil arabasından istifadə edə bilməyən, lakin hələ də müəyyən səviyyədə nəzarət istəyən xəstələrə kömək edə bilər.”
Gələcəkdə CoNav kreslosu kommersiyalaşdırıla və müvəqqəti və ya daimi fiziki qüsurları olan insanlara kömək etmək üçün səhiyyə müəssisələrində yerləşdirilə bilər. Bundan əlavə, şəhərlər daha ağıllı və əlaqəli olduqda, kreslo istifadəçilərə şəhər mənzərələrində təhlükəsiz hərəkət etməyə imkan verən ağıllı piyada keçidləri, liftlər və ya daxili bələdçilik sistemləri kimi digər IoT əsaslı naviqasiya vasitələrinə qoşula bilər.
Tədqiqat qrupu indi CoNav-ın imkanlarını daha da təkmilləşdirmək və onun fəaliyyətini qiymətləndirmək üçün çalışır. Onlar tezliklə müxtəlif səviyyələrdə hərəkət qabiliyyəti zəif olan insanlar da daxil olmaqla, daha müxtəlif istifadəçilər qrupu ilə testlər keçirməyi planlaşdırırlar.
“Növbəti tədqiqatlarımızın bir hissəsi olaraq, biz həmçinin piyadaların hərəkətini nəzərə alaraq əlil arabasının izdihamlı mühitlərdə hərəkət etməsinə imkan verən sosial cəhətdən məlumatlı paylaşılan nəzarət çərçivəsini inkişaf etdirməyi planlaşdırırıq” dedi Menassa. “Bundan əlavə, biz daha geniş istifadəçiləri dəstəkləmək üçün multimodal girişləri (məsələn, EEG siqnalları və göz izləmə) birləşdirərək kafedranın istifadəçi interfeysini təkmilləşdirmək istərdik.”
Ətraflı məlumat: Yifan Xu et al, CoNav sədri: Quraşdırılmış Mühitdə Ortaq Nəzarət Naviqasiyası üçün ROS əsaslı Ağıllı Təkərli Kreslo Dizaynı, arXiv (2025). DOI: 10.48550/arxiv.2501.09680
Jurnal məlumatı: arXiv
© 2025 Science X Network