














Barmaq formalı toxunma sensoru çox istiqamətli qüvvə aşkarlaması və materialın identifikasiyası ilə robot toxunuşu inkişaf etdirir
Getdikcə daha təkmilləşən sensorların inkişafı robotlar, təhlükəsizlik sistemləri, virtual reallıq (VR) avadanlığı və mürəkkəb protezlər də daxil olmaqla müxtəlif texnologiyaların inkişafını asanlaşdıra bilər. Toxunma ilə bağlı müxtəlif növ məlumatları (məsələn, təzyiq, faktura və material növü) götürə bilən multimodal toxunma sensorları insanın toxunma duyğusunun süni surətdə təkrarlanmasından faydalana bilən tətbiqlər üçün ən perspektivlilər arasındadır.
Son bir neçə onillikdə elektronika mühəndisləri yüksək həssas toxunma sensorlarının geniş spektrini yaratsalar da , tətbiq olunan qüvvələrin həm istiqamətini, həm də miqyasını dəqiq müəyyən etmək indiyə qədər çətin olduğunu sübut etdi. Üstəlik, bir çox mövcud sensorlar obyektlərin və ya səthlərin hazırlandığı materialları düzgün müəyyən edə bilmir.
Çin Elmlər Akademiyasının tədqiqatçıları bu yaxınlarda insan barmaqlarının uclarından ilhamlanan yeni multimodal toxunma sensoru hazırlayıblar. Advanced Materials -da dərc olunan bir məqalədə təqdim edilən sensorun qüvvələrin istiqamətini müəyyən etdiyi, eyni zamanda real dünyada tez-tez tapılan 12 material arasında dəqiq fərq qoyduğu tapıldı.
Chengcheng Han, Zhi Cao və onların həmkarları məqalələrində yazırdılar: “Multimodal toxunma qavrayışı insan-kompüter qarşılıqlı əlaqəsini inkişaf etdirmək üçün çox vacibdir, lakin real vaxt rejimində çoxölçülü qüvvələrin aşkarlanması və materialın identifikasiyası çətin olaraq qalır”. Burada triboelektrik effektə əsaslanan, çoxistiqamətli qüvvə hissiyyatını və materialı identifikasiya edə bilən barmaq formalı toxunma sensoru (FTS) təklif edilir.
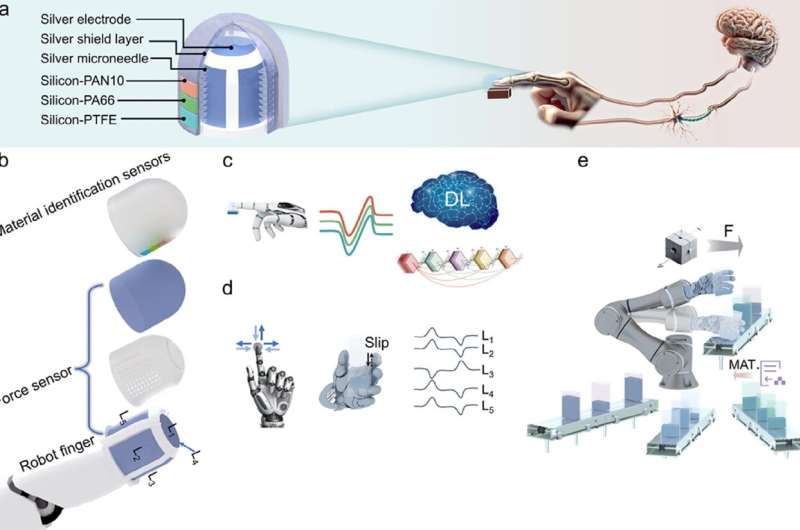
Yeni sensor insan barmaq ucu kimi formalaşdırılıb və iki əsas tamamlayıcı strukturdan ibarətdir. Birincisi materialları müəyyən etmək üçün nəzərdə tutulmuş xarici bölmə, ikincisi isə qüvvələri və onların istiqamətini hiss edən daxili bölmədir.
https://googleads.g.doubleclick.net/pagead/ads?client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=2520359048&adf=746485419&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&fwrnh=100&lmt=1744978057&rafmt=1&armr=3&format=750×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-04-finger-tactile-sensor-advances-robotic.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTM1LjAuNzA0OS45NiIsbnVsbCwwLG51bGwsIjY0IixbWyJHb29nbGUgQ2hyb21lIiwiMTM1LjAuNzA0OS45NiJdLFsiTm90LUEuQnJhbmQiLCI4LjAuMC4wIl0sWyJDaHJvbWl1bSIsIjEzNS4wLjcwNDkuOTYiXV0sMF0.&dt=1744978057632&bpp=1&bdt=92&idt=92&shv=r20250417&mjsv=m202504140101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1744977703%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1744977703%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1744977703%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0&nras=1&correlator=8183197665337&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=448&ady=1790&biw=1905&bih=945&scr_x=0&scr_y=0&eid=95357427%2C95355973%2C95355975%2C31091833%2C42531705%2C95355501%2C95357877%2C95356661%2C95356809%2C95357715&oid=2&pvsid=2905217418326930&tmod=1602272028&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=97
Han, Cao və onların həmkarları yazıb: “Üç material barmaq padində silikon qabığın səthinə yerləşdirilərək materialın identifikasiyası üçün tək elektrodlu sensorlar əmələ gətirir”.
“Güc hissetmə bölməsində silikon qabığın xarici səthi qoruyucu təbəqə kimi keçirici gümüş pastası ilə örtülmüşdür. Daxili divarda dörd silikon mikro iynə massivi və silikon qabar var, beş gümüş elektrod isə daxili polilaktik turşu skeleti ilə örtülmüşdür. Komponentlər bir-birinə bağlanan strukturlar vasitəsilə birləşir, barmaqların dırnaqları və diş ətləri arasında lokal təmasda olan dırnaqları ayırmağa imkan verir. skelet, beş elektroddan gələn siqnallar vasitəsilə qüvvənin istiqamətini aşkar etməyə imkan verir.”
Tədqiqatçılar barmaq formalı toxunma sensorunu bir sıra ilkin simulyasiyalar və real dünya təcrübələrində qiymətləndirdilər. Onlar fərqli qüvvələrə tətbiq olunduqda yaxşı performans göstərdiyini, eyni zamanda fərqli materialları olduqca yüksək dəqiqliklə müəyyən etdiyini tapdılar.
Tədqiqatçılar real dünya təcrübələrinin bir hissəsi olaraq, topladığı məlumatlara əsaslanan materialları müəyyən etmək üçün LabVIEW və Jupyter məlumat təhlili platformalarından istifadə edərək öz sensorunu robot əllə birləşdirdilər. Onların tapıntıları çox ümidverici idi və bu, sensorun robot sistemlərin toxunma qabiliyyətini artırmaq üçün istifadə oluna biləcəyini göstərirdi.
“Xarici sensorlar 12 materialın tanınmasında 98,33% dəqiqliyə nail olurlar”, – tədqiqatçılar yazıblar. “Bundan əlavə, robot əlinə inteqrasiya olunmuş FTS, intellektual çeşidləmə mühitində real vaxt rejimində materialın identifikasiyasına və qüvvənin aşkarlanmasına imkan verir. Bu tədqiqat, ağıllı robot texnikası üçün toxunma qavrayışında tətbiqlər üçün böyük potensiala malikdir.”
Bu tədqiqat qrupunun son səyləri insanabənzər robotların, ağıllı protezlərin və toxunma ilə bağlı məlumatların toplanmasından faydalana biləcək digər texnologiyaların gələcək inkişafına töhfə verə bilər. Gələcəkdə komandanın sensoru da daha da təkmilləşdirilə bilər; məsələn, daha geniş çeşidli materialların müəyyən edilməsini və daha çox növ toxunma məlumatının aşkar edilməsini dəstəkləmək.
Ətraflı məlumat: Chengcheng Han et al, Çox İstiqamətli Qüvvə və Materialın İdentifikasiyası üçün Multimodal Barmaq Şəkli Toxunma Sensoru, Qabaqcıl Materiallar (2025). DOI: 10.1002/adma.202414096
Jurnal məlumatı: Təkmil materiallar
© 2025 Science X Network

