Bionic LiDAR sistemi, adaptiv fokuslama yolu ilə retinanın kənar qətnaməsinə nail olur
Tejasri Gururaj tərəfindən , Phys.org
Stephanie Baum tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
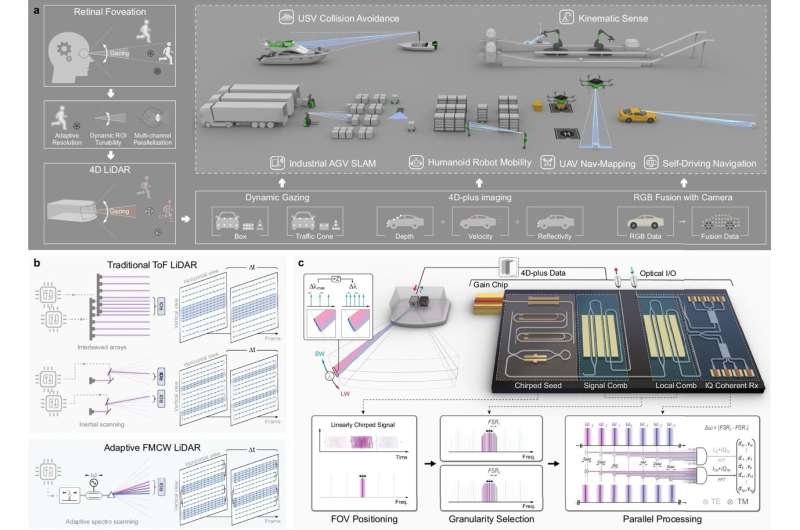
Adaptiv 4D maşın görmə üçün inteqrasiya olunmuş bionik LiDAR. Kredit: Nature Communications (2025). DOI: 10.1038/s41467-025-66529-7
Bu yaxınlarda aparılan bir araşdırmada, Çinli tədqiqatçılar, bütün görmə sahəsində geniş məlumatlılığı qoruyarkən, yüksək qətnaməli sensoru maraq bölgələrinə (ROI) dinamik şəkildə cəmləşdirərək insan gözünün fokusunu təqlid edən çip miqyaslı LiDAR sistemi hazırladılar.
Tədqiqat Nature Communications jurnalında dərc olunub .
LiDAR sistemi, özünü idarə edən avtomobillərdə, dronlarda və robotlarda 3D səhnələri millimetr dəqiqliyi ilə xəritələşdirmək üçün lazer şüaları ataraq maşın görmə qabiliyyətini gücləndirir. Göz ən sıx sensorlarını foveada (iti mərkəzi görmə nöqtəsi) yerləşdirir və baxışları vacib olana yönəldir. Bunun əksinə olaraq, əksər LiDAR-lar hər yerə vahid (çox vaxt qaba) qətnamə yayan sərt paralel şüalar və ya skanlardan istifadə edir. Detalların artırılması, daha çox kanalın bərabər şəkildə əlavə edilməsi deməkdir ki, bu da xərcləri, gücü və mürəkkəbliyi artırır.
Komandanın dizaynı, gözün təxmini 0,017° həddindən iki dəfə kəskin olan ROI-lərdə “retinadan kənarda” 0,012° bucaq qətnaməsinə nail olur. Bu o deməkdir ki, sistem ən kiçik bucaqlarla ayrılmış nöqtələri, məsələn, uzaq yol nişanındakı incə detalları ayırd edə bilir. O, tələb olunduqda paralel sensor kanallarını yenidən bölüşdürür və bahalı kobud qüvvə miqyaslamasından qaçınır.
Phys.org, Pekin Universitetinin Elektronika Məktəbindən tədqiqatın həmmüəllifləri Ruixuan Chen və Xingjun Wang ilə danışdı.
Tədqiqatçılar izah etdilər ki, “motivasiya bioloji və maşın qavrayışı arasındakı praktik uyğunsuzluqdan irəli gəlir. İnsan gözü diqqəti yenidən bölüşdürməklə – geniş məlumatlılığı qorumaqla və resursları vacib olan şeylərə yönəltməklə yüksək kəskinliyə və enerji səmərəliliyinə nail olur. Bunun əksinə olaraq, LiDAR həlli tez-tez “hər yerdə daha çox kanal” tərəfindən həyata keçirilir ki, bu da tez bir zamanda bahalı və enerjiyə ehtiyacı olan hala gəlir.”Oyna
00:00
00:33SəssizParametrlərPIPTam ekrana daxil olun
OynaHərəkət edən qatar mənzərəsinin real vaxt rejimində 4D nöqtə buludu görüntüsü. Müəllif: Nature Communications (2025). DOI: 10.1038/s41467-025-66529-7
Miqyaslama problemi
Maşın görmə sistemləri ənənəvi kameralardan kənara çıxaraq dəqiq məsafə ölçməsini və 3D ətraf mühit qavrayışını təmin edən LiDAR sensorlarını da əhatə edir. Lakin passiv kameralardan fərqli olaraq, LiDAR hər piksel üçün emissiya və qəbuledici avadanlıq tələb edir və bu da əldə edilə bilən qətnaməni təmin edir.
LiDAR qətnaməsinin yaxşılaşdırılmasına dair mövcud yanaşmalar ciddi bir maneə ilə üzləşir. Kanalların təkrarlanması xətti qətnamə qazancları təmin edir, lakin mürəkkəblik, güc və qiymət baxımından superxətti partlayışlara səbəb olur.
Tədqiqatçılar izah etdilər ki, “Birincisi, qətnamə aparat kanallarının sayı və skanlama mexanikası ilə sıx bağlıdır. İkincisi, LiDAR aktiv sensordur: hər piksel həm ötürmə, həm də qəbul resurslarına effektiv şəkildə xərc çəkir. Bu, adaptiv fokuslanmanı passiv görüntüləmədən daha çətinləşdirir, çünki göz təhlükəsizliyi məhdudiyyətlərinə cavab verərkən optik gücü, qəbuledici həssaslığı və rəqəmsallaşdırma bant genişliyini idarə etməlisiniz.”
Koherent tezlik modulyasiyalı davamlı dalğa LiDAR üçün bu çətinlik xüsusilə kəskindir. Hər bir koherent kanal sabit tezlik nəzarəti, mürəkkəb qəbul avadanlığı və sıx kalibrləmə tələb edir. Bu, kütləvi kanal təkrarlanmasını iqtisadi cəhətdən əsaslandırmağı daha da çətinləşdirir.
Biomimetik həll
Tədqiqatçıların həlli iki əsas texnologiyanı birləşdirir. Bunlara 100 nm-dən çox tənzimləmə diapazonuna malik çevik xarici boşluqlu lazer (ECL) və nazik təbəqəli litium niobatı (TFLN) platformalarında qurulmuş yenidən konfiqurasiya edilə bilən elektro-optik tezlik çubuqları daxildir.
ECL, koherent diapazon üçün yüksək keyfiyyətli FMCW cingiltili siqnalları təmin edir və dalğa uzunluğu ilə idarə olunan şüa idarəetmə mexanizmi kimi çıxış edir. Mərkəzi dalğa uzunluğunu tənzimləməklə sistem baxış istiqamətini geniş baxış sahəsi daxilində sürətlə yönləndirə bilər.
Elektro-optik daraq daha sonra eyni cırıltılı lazer mənbəyindən birdən çox paralel FMCW daşıyıcısı yaradır. Ən əsası, radiotezlik sürücüsü şərtlərinin tənzimlənməsi daraq aralığını dəyişdirir.
Tədqiqatçılar əlavə ediblər ki, “Məhz bu, ‘böyütməni’ təmin edir – optikanı dəyişdirmədən və ya kanallar əlavə etmədən seçilmiş bölgədə nöqtə sıxlığını artıra (daha incə nümunə götürmə) və ya azalda (daha qaba nümunə götürmə) bilərik”.
Sistem tədqiqatçıların “mikroparalelizm” adlandırdığı şeydən istifadə edir. Bu, dinamik yenidən yerləşdirmə yolu ilə daha çox skanlama xəttinə bərabər nail olmaq üçün orta sayda fiziki kanaldan istifadə etmək deməkdir.
Gündəlik məlumat üçün Phys.org-a etibar edən 100.000-dən çox abunəçi ilə elm, texnologiya və kosmosdakı ən son yenilikləri kəşf edin . Pulsuz bülletenimizə abunə olun və vacib olan nailiyyətlər, innovasiyalar və tədqiqatlar haqqında gündəlik və ya həftəlik yeniliklərdən xəbərdar olun .
Eksperimental təsdiqləmə
Komanda, sistemin imkanlarını üç eksperimental ssenaridə nümayiş etdirərək, fokuslanmış bölgələrdə insan retinasının nominal limitini aşaraq 0,012° bucaq qətnaməsinə nail oldu.
Statik səhnə görüntüləməsində sistem tam görünüş sahəsi skanlamaları üçün 54×71 piksel, lokal fokuslanmış skanlamalar üçün isə 17×71 piksel qətnamə ilə simulyasiya edilmiş yol mühitini çəkdi. Bu fokuslanmış skanlamalar şaquli detal sıxlığını dörd dəfə artıraraq əvvəllər görünməyən maneələri aşkar etdi və nöqtələrin 90%-i 1,3 sm-dən aşağı dəqiqliklə çəkildi.
Tədqiqatçılar həmçinin dəqiq 3D həndəsəni RGB görünüş məlumatları ilə birləşdirən rəngli nöqtə buludları yaradan LiDAR-kamera birləşməsini nümayiş etdirdilər. Standart və fokuslanmış skanları müqayisə edərkən rəng histoqramının uyğunlaşdırılması təxminən 10% yaxşılaşdı ki, bu da 3D nöqtələri ilə görüntü pikselləri arasında daha yaxşı uyğunluğu göstərir.
Tədqiqatçılar izah etdilər ki, “LiDAR-ı kamera ilə birləşdirməklə rəngli nöqtə buludları yaradırıq və səhnə təsvirini zənginləşdiririk ki, bu da şərh olunmanı yaxşılaşdırır və tekstura və semantik işarələrdən asılı olan aşağı axın qavrayış tapşırıqlarını dəstəkləyir”.
Bəlkə də ən təsirli olanı, komanda real vaxt rejimində 4D-plus görüntüləməsini çəkdi – hər nöqtənin eyni vaxtda mövqeyi, fırlanma sürətini, səthin əks olunmasını və rəngini göstərdiyi basketbol atışını. Geniş bir baxış sahəsində 8 Hz-də bu, standart 3D LiDAR-a görünməyən hərəkət nümunələrini ortaya qoydu.
Təcrübə işi gələcək inkişaf yollarını müəyyən edən mühüm sistem səviyyəli güzəştləri üzə çıxardı.
Tədqiqatçılar qeyd ediblər ki, “Ən aydın olanı bucaq qətnaməsi ilə kanal başına ölçmə başlığı arasındakı gərginlikdir. Paralel koherent oxumamızda hər bir kanal özünün üst-üstə düşməyən elektrik zolağını tutmalıdır. Təkrarlama sürətini azaltdıqda, bucaq nümunəsini daha incə şəkildə irəlilədə bilərik, lakin təcrübə göstərir ki, bu da kanal başına oxuma bant genişliyini sıxışdırır.”
Komanda texnologiyanın praktik tətbiqinə doğru irəliləməsi üçün bir neçə prioritet istiqamət müəyyən etmişdir. Bunlara TFLN platformalarında daha dərin monolit inteqrasiya, təkmilləşdirilmiş diapazon qətnaməsi üçün ultra genişzolaqlı süpürmə mənbələrinin hazırlanması və hadisəyə əsaslanan qavrayış üçün qapalı dövrəli diqqət siyasətlərinin tətbiqi daxildir.
Lifli bağlantılardan istifadə edən mövcud təcrübələr, material təsnifatı imkanlarını məhdudlaşdıran polyarizasiya qeyri-sabitliyini ortaya qoyur.
Tədqiqatçılar bildiriblər ki, “Lakin biz monolit inteqrasiyanın bu maneəni kökündən həll edəcəyini düşünürük. Qeyri-sabit lif yollarından məhdud çip dalğa ötürücülərinə keçməklə sabit polyarizasiya bərpasına nail ola bilərik.”
Bionik LiDAR sistemi muxtar nəqliyyat vasitələri, hava və dəniz dronları, robototexnika və neyromorfik görmə sistemlərini əhatə edən potensial tətbiqlər təklif edir. Tədqiqatçıların fikrincə, LiDAR-dan əlavə, yenidən konfiqurasiya edilə bilən daraqlar optik rabitə, koherent tomoqrafiya, sıxılma sensoru və dəqiq metrologiya üçün sürətli spektral analizə imkan verir.
Müəllifimiz Tejasri Gururaj tərəfindən sizin üçün yazılıb, Stefani Baum tərəfindən redaktə edilib və Robert Egan tərəfindən faktlar yoxlanılıb və nəzərdən keçirilib — bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Ruixuan Chen və digərləri, Adaptiv 4D maşın görmə üçün inteqrasiya olunmuş bionik LiDAR, Nature Communications (2025). DOI: 10.1038/s41467-025-66529-7
Jurnal məlumatları: Nature Communications
© 2026 Science X Network