














Bir şəkil, robotların yollarını tapmaları lazım olan tək şeydir
İnqrid Fadelli , Phys.org tərəfindən
Sadie Harley tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
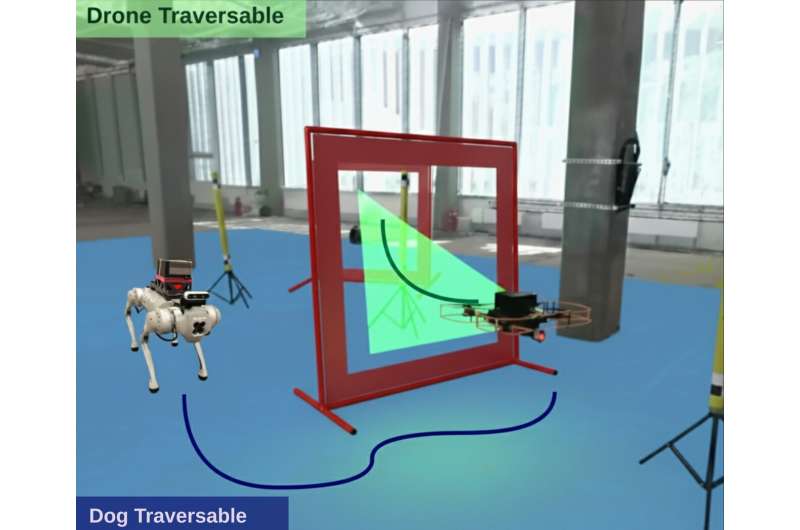
Çarpaz təcəssüm keçidi və mümkün trayektoriya generasiyası. Ayaqlı robot (mənbə) ətraf mühiti araşdırır və keçid üçün bir yol (mavi yol) qurur, hava robotu (hədəf) isə ortaq iş sahəsində təhlükəsiz naviqasiya üçün istifadə edir (yaşıl həcm). Müəllif: İana Zhura və başqaları.
Son onilliklərdə robotların imkanları əhəmiyyətli dərəcədə yaxşılaşsa da, onlar həmişə naməlum, dinamik və mürəkkəb mühitlərdə etibarlı və təhlükəsiz hərəkət edə bilmirlər. Ətraf mühitdə hərəkət etmək üçün robotlar sensorlar və ya kameralar tərəfindən toplanan məlumatları emal edən və gələcək hərəkətlərini buna uyğun olaraq planlaşdıran alqoritmlərə etibar edirlər.
Skolkovo Elm və Texnologiya İnstitutunun (Skoltech) tədqiqatçıları robotun hara getməli olduğunu və necə hərəkət etməli olduğunu tək bir görüntüyə əsaslanaraq təxmin edə bilən yeni yüngül Generativ Süni İntellekt modeli olan SwarmDiffusion hazırlayıblar. ArXiv serverində əvvəlcədən dərc olunmuş bir məqalədə təqdim edilən SwarmDiffusion , giriş məlumatlarına tədricən səs-küy əlavə edən və sonra istənilən nəticələrə nail olmaq üçün onu aradan qaldıran bir texnika olan diffuziya modelinə əsaslanır.
Məqalənin baş müəllifi Dzmitry Tsetserukou Tech Xplore-a bildirib ki, “Naviqasiya ‘görməkdən’ daha çox şeydir, robotun necə hərəkət edəcəyinə də qərar verməsi lazımdır və mövcud sistemlər hələ də köhnəlmiş hiss olunur”.
“Ənənəvi olaraq, robotlar ətraflı xəritə qurur, hansı ərazilərin təhlükəsiz göründüyünü qeyd edir və sonra marşrut tapmaq üçün ağır bir alqoritm işlədirlər. Bu, işləyir, amma yavaşdır və süni intellektdəki bugünkü irəliləyişdən tam istifadə etmir. İşimizə ilham verən də budur.”
Tsetserukou və həmkarlarının son işinin əsas məqsədi öyrənilə bilən və ümumiləşdirilə bilən “düşünən” yol planlaşdırma metodu hazırlamaq idi. SwarmDiffusion tək bir görüntünü emal etməklə robotun hara getməli olduğunu tez bir zamanda müəyyən edə bilər. Belə bir yanaşma əlavə xəritələşdirmə addımlarına və ya mürəkkəb yol planlaşdırma texnikalarına ehtiyacı aradan qaldıracaq.
Tsetserukou izah etdi: “Həll etdiyimiz digər bir çətinlik, hər robot platformasının fərqli hərəkət etməsidir”.
“Dron, dördayaqlı və təkərli robotun hər birinin öz hərəkət tərzi var. Müasir yanaşmaların əksəriyyəti onların hər biri üçün xüsusi məlumatların toplanmasını tələb edir ki, bu da vaxt aparır və sadəcə miqyaslandırıla bilməz. Məqsədimiz əvvəlcədən təlim üçün yalnız bir neçə robota xas trayektoriyaya ehtiyacı olan, lakin tək bir görüntüdən necə təhlükəsiz hərəkət edəcəyinizi anlaya bilən bir sistem hazırlamaq idi.”
SwarmDiffusion: Səbəbləri müəyyən edən bir yol planlayıcısı
Tədqiqatçılar tərəfindən təqdim edilən yeni model, qismən insanların sağlam düşüncələrinə əsaslanaraq ətraf mühitdə necə hərəkət etmələrindən ilhamlanıb. Komanda robotlara ətraflarındakı təhlükəli əraziləri, maneələri və digər çətinlikləri tez və “intuitiv şəkildə” müəyyən etməyə və hərəkətlərini buna uyğun olaraq planlaşdırmağa imkan vermək istəyirdi.
Tsetserukou bildirib ki, “Yol planlaşdırması muxtar robotlar üçün əsas vəzifələrdən biridir. Robot təkcə A nöqtəsindən B nöqtəsinə gedən yolu dizayn etməməli, həm də maneələrdən qaçmalıdır. Bununla belə, yol planlaşdırma alqoritmlərinin əksəriyyəti A*, RRT, APF, CHOMP və s. kimi klassik metodlar üzərində qurulub, görünməyən mühitdə işləmək üçün heç bir ümumiləşdirməyə malik deyil və bəzi hallarda terabayt yaddaş ağırlığında olan ağır xəritə tələb edir.”
SwarmDiffusion tək 2D görüntüdən robotun təhlükəsiz hərəkət edə biləcəyi və riskli olan sahələri müəyyən edə bilər. Model, açıq mərtəbələri (yəni, daha az divarlı böyük məkanları), maneələri, dar boşluqları və təhlükəsiz naviqasiyaya mane ola biləcək digər mümkün təhlükələri müəyyən etmək üçün Vision-Language Model (VLM) tərəfindən verilən proqnozlara əsaslanır.Təklif olunan model iki qarşılıqlı əlaqəli komponentdən ibarətdir: (1) Keçidlilik Tələbə modeli, burada dondurulmuş vizual kodlayıcı və vəziyyət kodlayıcısı FiLM vasitəsilə xüsusiyyətləri birgə modulyasiya edərək görmə-dil modelindən (VLM) ayrılmış keçidlilik proqnozu yaradır; və (2) Diffuziya əsaslı Trayektoriya Generasiyası, burada UNet modulyasiya edilmiş vizual xüsusiyyətlər və başlanğıc-məqsəd vektoru ilə şərtləndirilmiş təsadüfi trayektoriyanı tədricən azaldır və mümkün və təhlükəsiz yollar x0 verir. Proses N səs-küy salma addımları üçün təkrarlanır. Mənbə: İana Zhura və başqaları.
SwarmDiffusion ətraf mühitin ətraflı xəritəsini yaratmaq əvəzinə, robotun toqquşmalardan qaçınmaq və hədəf nöqtəsinə doğru təhlükəsiz şəkildə irəliləmək üçün getməli olduğu yolu sadəcə olaraq müəyyənləşdirir. Bu yolu yaratmaq üçün model təxmini bir təxminlə başlayır və sonra tədricən, lakin tez bir zamanda səs-küyü azaltmaqla onu təkmilləşdirir.
Tsetserukou izah etdi ki, “Yüksək səviyyəli mühakimə, istifadəçidən heç bir sorğu almadan maneələrin mövqeyini, keçilə bilən sahələri və davranışı müəyyən edən VLM modeli ilə həyata keçirilir .” “Digər tərəfdən, səs-küyün azaldılması prosesi ilə diffuziya məqsədə doğru hamar bir yol yaradır.”
“SwarmDiffusion-un daha bir üstünlüyü ondan ibarətdir ki, o, dronlar, ayaqlı robotlar və təkərli robotlar da daxil olmaqla geniş robotlara tətbiq oluna bilər. Bunun səbəbi, o, yalnız minimal məlumat tələb edən (məsələn, robotun üstünlük verdiyi istiqamət və ya dönmə davranışı) tək bir robot növünə xas olmayan ümumi hərəkət prinsiplərini öyrənə bilməsidir”, – məqalənin ilk müəllifi, doktorant İana Zhura bildirib.
SwarmDiffusion həmçinin yüngüldür və robotun daxili prosessorları tərəfindən birbaşa idarə oluna bilər. Tədqiqatçılar modeli bir sıra sınaqlarda sınaqdan keçirdilər və onu iki fərqli robota, dron və itdən ilhamlanan dörd ayaqlı robota tətbiq etdilər. Onlar aşkar etdilər ki, bu, robotların gələcək hərəkətlərini qısa müddət ərzində (təxminən 90 millisaniyə) etibarlı şəkildə planlaşdırır.PUA simulyasiya arxitekturası. Müəllif: İana Zhura və başqaları.
“Təcrübələrimiz sübut etdi ki, o, robot tərəfindən əvvəllər heç vaxt görünməmiş mühitlərdə etibarlı şəkildə işləyir”, – deyə Tsetserukou bildirib.
“İnsan beyni ilk baxışdan yeni mühitlərdə naviqasiyanı təmin edir və gözlərin stereo görmə məlumatlarından istifadə edir. Əksinə, SwarmDiffusion yalnız insan qavrayışını üstələyən 2D görüntülərə əsaslanır. Artıq yol planlaşdırması üçün LiDAR, RADAR və ya dərinlik kameraları kimi bahalı 3D sensorlara ehtiyacımız yoxdur.”
Real həyat tətbiqləri və gələcək təkmilləşdirmələr
Tsetserukou və həmkarları tərəfindən hazırlanmış yeni model robot naviqasiyasını xeyli sadələşdirə və müxtəlif robototexnika tətbiqləri üçün yeni imkanlar aça bilər. Məsələn, bu model anbarlarda, kənd təsərrüfatı müəssisələrində və ya sənaye sahələrində robot qruplarının naviqasiyasını, eləcə də axtarış-xilasetmə missiyalarını, infrastruktur yoxlamalarını, bağlamaların çatdırılmasını və təbii mühitin monitorinqini həyata keçirmək üçün hazırlanmış robotların naviqasiyasını təkmilləşdirmək üçün istifadə edilə bilər.
“Biz sübut etdik ki, robotların inamla hərəkət etməsi üçün mürəkkəb xəritələrə və ya uzun emal zəncirlərinə ehtiyacı yoxdur”, – deyə Tsetserukou bildirib.
“SwarmDiffusion tək bir görüntünü çəkib hərəkətə çevirə bilər və robotları yavaşladan xərclərin çox hissəsini azalda bilər, çünki hər platforma üçün yalnız bir neçə yol nümunəsi tələb olunur. Bu, həmçinin maraqlı bir ehtimala işarə edir: daimi yenidənqurma və ya fərdiləşdirmə olmadan müxtəlif robotlara rəhbərlik edə bilən tək, çox yönlü bir model.”Komandanın SwarmDiffusion-un müxtəlif robot növlərində yerləşdirilməsini necə təsəvvür etdiyini ümumiləşdirən şəkil. Müəllif: Iana Zhura və başqaları.
Tədqiqatçılar hazırda SwarmDiffusion-u daha da təkmilləşdirməyə və daha geniş real təcrübələrdə potensialını qiymətləndirməyə yönəlmiş yeni tədqiqatlar planlaşdırırlar. Onlar həmçinin, ortaq bir missiyanı komanda şəklində yerinə yetirmək qabiliyyətlərini artırıb-artırmadığını müəyyən etmək üçün tezliklə onu eyni anda birdən çox robota tətbiq etməyi ümid edirlər.
Tsetserukou bildirib ki, “SwarmDiffusion, robot qruplarına maneələr və yaradılan trayektoriyalar haqqında bilik mübadiləsi aparmaq üçün Swarm Diffusion Zəkasından istifadə edən vahid, ağıllı bir komanda şəklində birlikdə işləmək üçün qapı açır”.
“Gələcəyə baxaraq, yanaşmanı təkcə naviqasiyaya deyil, daha çox tapşırıqa da tətbiq etməyi planlaşdırırıq. Yol yaradan eyni ideya daha yaxşı baxış nöqtələrinin seçilməsinə, mənzərənin araşdırılmasına və hətta manipulyasiya tapşırıqlarının dəstəklənməsinə də kömək edə bilər. Uzunmüddətli məqsəd, bir çox ayrı modullara etibar etmədən gördüklərini, nə etməli olduğunu anlaya bilən və düzgün hərəkəti həyata keçirə bilən vahid bir model qurmaqdır.”
Tsetserukou və həmkarları qarşıdakı tədqiqatlarında bir komandadakı bir çox robot arasındakı koordinasiyaya daha çox diqqət yetirməyi planlaşdırırlar. Xüsusilə, onlar SwarmDiffusion-dan eyni anda bir çox müxtəlif növ robotların hərəkətlərinə istifadə etmək imkanlarını araşdıracaqlar ki, bu da onlara tapşırıqları daha sürətli və daha səmərəli şəkildə yerinə yetirməyə imkan verəcək.
Tsetserukou əlavə edib ki, “Gələcəkdə heterojen robotların sürülərinin naviqasiyası üçün Çox Agentli Söz Fondu Modeli quracağıq ki, humanoid, mobil, hava, dördayaqlı robotlar müstəqil yollar yaratsın və görünməyən mühitlərdə bir-biri ilə və insanlarla kəsişməsin”.
“Çoxagentli sistemlər üçün tapşırıq bölgüsü də diffuziya ilə idarə olunacaq. Bu inkişaf, Fiziki süni intellektli robotların robot şəhərlərində işləyəcəyi və insan dünyasına sorunsuz şəkildə inteqrasiya olunacağı Future 6.0 konsepsiyamızı təcəssüm etdirəcək.”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Sadie Harley tərəfindən redaktə edilmiş və Robert Egan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmişdir — bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Iana Zhura və digərləri, SwarmDiffusion: Heterogen Robotların Təcəssüm-Aqnostik Naviqasiyası üçün Başdan-Uca Keçidliliyə əsaslanan Diffuziya, arXiv (2025). DOI: 10.48550/arxiv.2512.02851
Jurnal məlumatı: arXiv
© 2026 Science X Network

