














Çevik robot əl termal, ətalət və güc sensorlarını birləşdirir
Ingrid Fadelli , Phys.org
Lisa Lock tərəfindən redaktə edilmişdir , Andrew Zinin tərəfindən nəzərdən keçirilmişdir
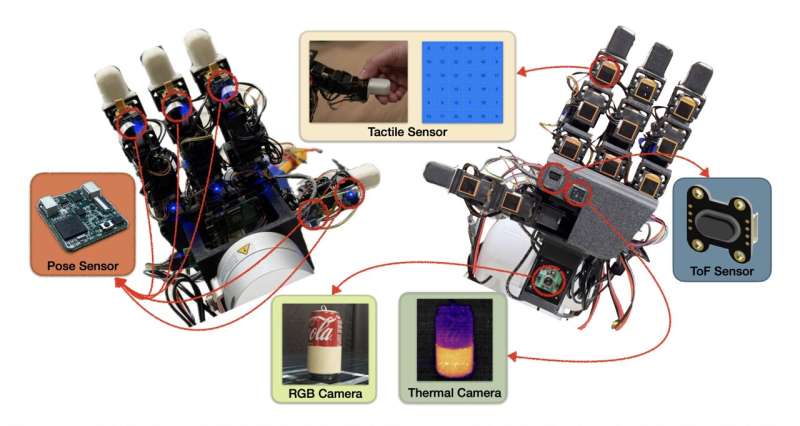
Redaktorların qeydləriTəklif olunan MOTIF əlinin arxası (sol) və ön (sağ). MOTIF əlinin əsas komponentləri etiketlənmişdir. Şəkildə RGB və termal kameralardan alınan məlumatların nümunəsi də göstərilir. Kredit: arXiv (2025). DOI: 10.48550/arxiv.2506.19201
Robotçular son onilliklər ərzində getdikcə daha təkmil sistemlər təqdim etsə də, mövcud robotların əksəriyyəti hələ insanlar kimi eyni çeviklik və hissetmə qabiliyyətinə malik obyektləri idarə edə bilmir. Bu, öz növbəsində, onların məişət işlərindən tutmuş təbii fəlakətlərdən sonra dağıntıların təmizlənməsinə və montaj və ya texniki xidmət tapşırıqlarının yerinə yetirilməsinə qədər müxtəlif real işlərdə, xüsusən də yüksək temperaturun məhsuldarlığı əhəmiyyətli dərəcədə aşağı sala biləcəyi və təhlükəsiz əməliyyatlar üçün tələb olunan dəqiqliyi poza biləcəyi polad dəyirmanları və tökmə zavodları kimi yüksək temperaturlu iş mühitlərində performanslarına mənfi təsir göstərir.
Cənubi Kaliforniya Universitetinin tədqiqatçıları bu yaxınlarda insanabənzər robotların obyektlərin manipulyasiya imkanlarını təkmilləşdirə bilən yeni robotik əl olan MOTIF (Termal, İnertial və Force sensorları ilə Multimodal Müşahidə) əlini inkişaf etdirdilər. arXiv preprint serverinə göndərilən məqalədə təqdim edilən yenilik toxunma sensorları , dərinlik sensoru, termal kamera , inertial ölçmə vahidi (IMU) sensorları və vizual sensor daxil olmaqla, sensor cihazlarının birləşməsinə malikdir .
Daniel Seita, Hanyang Zhou, Wenhao Liu və Haozhe Lou Tech Xplore-a deyiblər: “Bizim məqaləmiz robot manipulyasiyasını ənənəvi vizual və toxunma hissiyyatından kənara çıxarmaq ehtiyacından yaranıb”. “Mövcud çoxbarmaqlı robot əllər tez-tez termal məlumatlılıq və həssas əlaqə rəyi ilə əlaqəli mürəkkəb tapşırıqlar üçün lazım olan inteqrasiya edilmiş hissetmə imkanlarından məhrumdur.”
Seita və tələbələrinin son araşdırmasının əsas məqsədi insan əllərindən ilhamlanaraq obyektləri həm təhlükəsiz, həm də dəqiq idarə edə bilən yeni çox yönlü və multimodal robot əl hazırlamaq idi. Daha əhatəli sensor girişindən istifadə etməklə, onların yaratdığı əl ev təsərrüfatlarından fabriklərə qədər müxtəlif mühitlərdə daha incə obyekt qarşılıqlı əlaqəsi həyata keçirə bilər.
“Başlanğıcda ən intuitiv fikir, insanın gündəlik qavrayış təcrübələri ilə daha sıx uyğunlaşan sistemlərin necə düzgün dizayn ediləcəyini araşdırmaqdır. Biz insan davranış fəaliyyətlərindən ilham almışıq”, – Zhou və Liu izah etdi.
“Biz əvvəllər kommersiya baxımından mövcud olan bir neçə çevik robot əllərdən istifadə etdik. Biz başa düşdük ki, bir çox mövcud aparat dizaynları mexaniki ötürmə strukturlarına diqqət yetirir və birbaşa ala bildiyimiz məhsullar bizim tədqiqat ideyalarımızın bir çoxu üçün hissetmə tələblərimizə cavab vermir. Bu təcrübə bizi öz vizyonumuza uyğun olaraq cihazları dizayn etməyə və təkmilləşdirməyə imkan verəcək DIY-genişlənə bilən aparat platforması axtarmağa sövq etdi.
“MOTİF əli tək çevik platformaya bir neçə sensoru – istilik, dərinlik, RGB (vizual), inertial (IMU) və toxunma) birləşdirən qabaqcıl robotik əldir” dedi tədqiqat qrupu. “O, geniş şəkildə istifadə olunan LEAP əl dizaynını genişləndirərək, təkmil hissetmə imkanlarını təmin edir. Onun əsas üstünlükləri ətraf mühitlə bağlı hərtərəfli məlumatlılıq, isti obyektləri təhlükəsiz idarə etmək bacarığı və oxşar görünüşə malik, lakin müxtəlif fiziki xassələri olan obyektlər arasında fərqləndirməni əhatə edir.”MOTIF əli, tədqiqatçılar tərəfindən hazırlanmış robot əl. Kredit: Zhou et al
MOTIF əlinin potensialını qiymətləndirmək üçün tədqiqatçılar laboratoriya şəraitində iki fərqli təcrübə həyata keçirdilər. İlk təcrübə əlin cisimləri tutma qabiliyyətini qiymətləndirmək üçün hazırlanmışdır ki, onların temperaturu nəzərə alınmaqla, onların səthində xüsusilə isti bölgələrə toxunmamaq üçün.
İkinci təcrübə eyni formalı, lakin müxtəlif çəkilərə malik olan obyektlərin manipulyasiyasını nəzərdə tuturdu. Obyektlərin kütləsini təsnif etmək üçün əl onları idarə edərkən barmaq ucu ilə sadə hərəkətlər etdi.
“Tədqiqatımızın ən diqqətəlayiq nailiyyəti müxtəlif sensorların vahid çevik robot əlinə inteqrasiyası, onun manipulyasiya imkanlarını əhəmiyyətli dərəcədə artırmasıdır” dedi Lou. “Bizim tapıntılar göstərir ki, 3D rekonstruksiya ilə birlikdə istilik sensoru təhlükəsiz tutmağa effektiv şəkildə rəhbərlik edir və inertial zondlama obyektlərin dəqiq kütlə təsnifatına imkan verir.”
İlkin sınaqlarda bu tədqiqatçılar qrupu tərəfindən təqdim edilən robot əl müxtəlif obyektləri etibarlı şəkildə tutaraq, eyni zamanda onların kütlələrini yaxşı dəqiqliklə proqnozlaşdıraraq olduqca yaxşı performans göstərdi. Gələcəkdə MOTIF əli daha da təkmilləşdirilə və xüsusi tətbiqlər üçün potensialını təsdiqləmək üçün daha geniş təcrübələrdə sınaqdan keçirilə bilər.
Seita və tələbələri hesab edirlər ki, bu, məişət mühitində, peşəkar mətbəxlərdə və sənaye məkanlarında əl işlərini həll etmək üçün xüsusilə perspektivli ola bilər. Əl isti obyektləri təhlükəsiz idarə edə və onları yaxşı dəqiqliklə idarə edə bildiyinə görə, o, isti yeməklər bişirərkən, həm də qaynaq və ya vintləri sıxarkən digər mövcud sistemləri üstələyə bilər, çünki bu vəzifələr qüvvələrin dəqiq qiymətləndirilməsini və obyektin temperaturu əsasında manipulyasiya strategiyalarının uyğunlaşdırılmasını tələb edir.
“Gələcəkdə biz daha incə toxunma rəyi təmin etmək üçün əlavə yüksək ayırdetməli barmaq ucu sensorlarını (məsələn, Digit 360) inteqrasiya etməklə MOTIF əlini daha da təkmilləşdirməyi planlaşdırırıq” deyə Liu əlavə etdi. “Biz həmçinin multimodal algılama alqoritmlərimizi təkmilləşdirməyi və qabaqcıl əldə manipulyasiya tapşırıqları və mürəkkəb istilik və gücə əsaslanan qarşılıqlı əlaqə tələb edən mühitlər kimi mürəkkəb real dünya parametrlərində əlavə tətbiqləri araşdırmağı hədəfləyirik.”
“Bu məqalə platforma sistemini təqdim edir. Biz bu işi keçən həftə Santa Fedə keçirilən ISER 2025 konfransında təqdim etdik və bir çox böyük tədqiqatçılarla fikirlərimizi mübadilə etdik. Biz həqiqətən ümid edirik ki, bu, cəmiyyəti öz tədqiqat istiqamətlərində daha çox hissetmə üsulları haqqında düşünməyə ruhlandıracaq”, – Çjou əlavə edib.
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış , Liza Lok tərəfindən redaktə edilmiş və Endryu Zinin tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Hanyang Zhou və digərləri, MOTIF Əli: Termal, İnertial və Güc Sensorları ilə Multimodal Müşahidələr üçün Robotik Əl, arXiv (2025). DOI: 10.48550/arxiv.2506.19201
Jurnal məlumatı: arXiv
© 2025 Science X Network

