Dərin öyrənmə sistemi yumşaq, bio-ilhamlı robotlara yalnız bir kameradan istifadə edərək hərəkət etməyi öyrədir
Sənayedə və təhlükəli mühitlərdə istifadə olunanlar kimi adi robotları modelləşdirmək və idarə etmək asandır, lakin qapalı məkanlarda və qeyri-bərabər ərazilərdə işləmək üçün çox sərtdir. Yumşaq, bio-ruhlandıran robotlar ətraf mühitə uyğunlaşmaqda və başqa cür əlçatmaz yerlərdə manevr etməkdə daha yaxşıdır.
Bununla belə, bu daha çevik imkanlar adətən hər bir robot dizaynı üçün unikal şəkildə hazırlanmış bir sıra bort sensorları və məkan modelləri tələb edir.
MIT-də yeni və daha az resurs tələb edən bir yanaşma tətbiq edərək, bir qrup tədqiqatçı yumşaq, bio-ruhlandırmış robotlara tək bir təsvirdən hərəkət etməyi və əmrləri yerinə yetirməyi öyrədən daha az mürəkkəb, dərin öyrənən idarəetmə sistemi hazırlayıb.
Onların nəticələri Nature jurnalında dərc olunub .
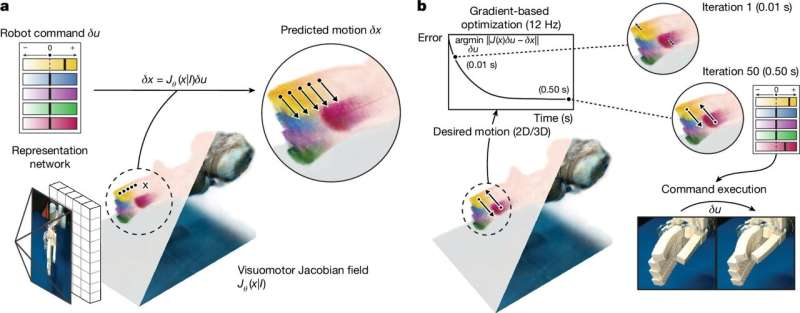
Təsadüfi əmrləri yerinə yetirən müxtəlif robotların videolarının iki-üç saatlıq multi-görüntüsünü dərin neyron şəbəkəsinə öyrətməklə , tədqiqatçılar şəbəkəni robotun həm formasını, həm də hərəkətlilik diapazonunu yalnız bir təsvirdən yenidən qurmağı öyrətdilər.
Əvvəlki maşın öyrənmə idarəetmə dizaynları mütəxəssis fərdiləşdirməsini və bahalı hərəkət tutma sistemlərini tələb edirdi. Ümumi təyinatlı idarəetmə sisteminin olmaması onların tətbiqlərini məhdudlaşdırdı və sürətli prototipləri daha az praktik hala gətirdi.
Tədqiqatçılar öz məqalələrində qeyd edirlər ki, “Bizim metodumuz robotların texniki dizaynını onları əl ilə modelləşdirmək qabiliyyətimizdən ayırır, bu da keçmişdə dəqiq istehsal, bahalı materiallar, geniş qavrayış imkanları və adi, sərt tikinti bloklarına etibar etməyi diktə edirdi”.
Yeni tək kameralı maşın öyrənmə yanaşması 3D çaplı pnevmatik əl, yumşaq auxetic bilək, 16 DOF Allegro əli və aşağı qiymətli Poppy robot qolu da daxil olmaqla müxtəlif robot sistemləri üzrə sınaqlarda yüksək dəqiqliyə nəzarət etməyə imkan verdi.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=2520359048&adf=1100001614&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&fwrnh=0&lmt=1752132659&rafmt=1&armr=3&format=750×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-07-deep-soft-bio-robots-camera.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTM4LjAuNzIwNC45NyIsbnVsbCwwLG51bGwsIjY0IixbWyJOb3QpQTtCcmFuZCIsIjguMC4wLjAiXSxbIkNocm9taXVtIiwiMTM4LjAuNzIwNC45NyJdLFsiR29vZ2xlIENocm9tZSIsIjEzOC4wLjcyMDQuOTciXV0sMF0.&dt=1752132659188&bpp=15&bdt=178&idt=87&shv=r20250708&mjsv=m202507020101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1752131675%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1752131675%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3D878d521b85743f4c%3AT%3D1751526237%3ART%3D1752131675%3AS%3DAA-AfjZCLruwaFzoQORvGPwXS3Y2&prev_fmts=0x0%2C1200x280&nras=1&correlator=1895865097004&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=448&ady=1743&biw=1905&bih=945&scr_x=0&scr_y=0&eid=95353386%2C95362655%2C95365234%2C95365460%2C42533294%2C95344787%2C95359265%2C95365797%2C31092547%2C95360684&oid=2&pvsid=2574761423101187&tmod=1856314984&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=2&fsb=1&dtd=455
Bu testlər birgə hərəkətdə üç dərəcədən az səhvə və barmaq ucu nəzarətində 4 millimetrdən (təxminən 0,15 düym) az səhvə nail olmağa müvəffəq oldu. Sistem həmçinin robotun hərəkətini və ətraf mühitdəki dəyişiklikləri kompensasiya edə bildi.
“Bu iş proqramlaşdırma robotlarından robotların öyrədilməsinə keçidə işarə edir”, Ph.D. tələbə Sizhe Lester Li MIT veb xüsusiyyətində .
“Bu gün bir çox robototexnika işləri geniş mühəndislik və kodlaşdırma tələb edir. Gələcəkdə biz robota nə edəcəyini göstərməyi və ona avtonom şəkildə məqsədə çatmağı öyrənməyə imkan verməyi nəzərdə tuturuq.”
Bu sistem yalnız görmə qabiliyyətinə güvəndiyinə görə, təmas hissi və toxunma manipulyasiyası tələb edən daha çevik tapşırıqlar üçün uyğun olmaya bilər. Vizual işarələrin qeyri-kafi olduğu hallarda onun performansı da pisləşə bilər.
Tədqiqatçılar təklif edirlər ki, toxunma və digər sensorların əlavə edilməsi robotlara daha mürəkkəb tapşırıqları yerinə yetirməyə imkan verə bilər . Minimum və ya heç bir quraşdırılmış sensoru olmayanlar da daxil olmaqla daha geniş spektrli robotların idarə edilməsini avtomatlaşdırmaq potensialı da var.
Müəllifimiz Charles Blue tərəfindən sizin üçün yazılmış , Sadie Harley tərəfindən redaktə edilmiş və Robert Eqan tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Sizhe Lester Li və digərləri, Yakobi sahələrini dərin şəbəkələrlə çıxararaq müxtəlif robotlara nəzarət etmək, Təbiət (2025). DOI: 10.1038/s41586-025-09170-0
Jurnal məlumatı: Təbiət
© 2025 Science X Network