Dörd ayaqlı robotları sanki it kimi öyrətmək
İnqrid Fadelli tərəfindən , Phys.org
Sadie Harley tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
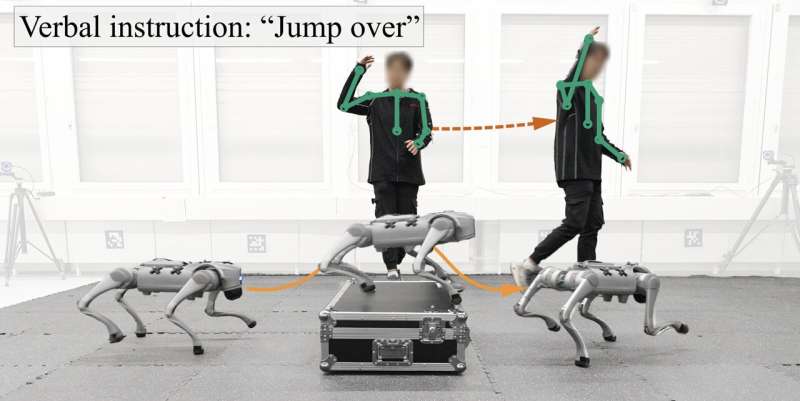
Şifahi və jest əmrlərinə cavab olaraq maneənin üzərindən tullanan dördayaqlı robot. Müəllif: Yoon və digərləri, RILAB (Koreya Universiteti), Hesablama Robototexnika Laboratoriyası (ETH Sürix)
Növbəti onilliklər ərzində robotların getdikcə daha çox ev təsərrüfatına, ictimai məkanlara və peşəkar mühitlərə yol tapacağı gözlənilir. Bu günə qədər hazırlanmış ən qabaqcıl və perspektivli robotların çoxu mərkəzi bədən quruluşundan, ətraflardan ibarət olan sözdə ayaqlı robotlardır.
Heyvanlardan ilhamlanan bədən quruluşları sayəsində ayaqlı robotlar adətən müxtəlif ərazilərdə etibarlı şəkildə hərəkət edə, pilləkənlərə effektiv şəkildə qalxa, maneələrdən yayına və təkərli robotların çata bilmədiyi ərazilərə daxil ola bilirlər.
Hubble yeni tip obyektlərin ilk nümunəsi olan Cloud-9-u araşdırır
Video Player is loading.Play Video
Potensiallarına baxmayaraq, bu robotların əksəriyyəti yalnız simulyasiya edilmiş mühitlərdə geniş şəkildə öyrədildikləri tapşırıqları yerinə yetirə bilir və insanlarla real həyatda qarşılıqlı əlaqə zamanı yeni bacarıqlar əldə etməkdə çətinlik çəkir.
Koreya Universiteti, ETH Sürix və Kaliforniya Los-Anceles Universitetinin (UCLA) tədqiqatçıları real dünyada robot təlimini sadələşdirə biləcək yeni it təlimindən ilhamlanan bir çərçivə təqdim etdilər. arXiv preprint serverində dərc olunmuş bir məqalədə təqdim edilən bu öyrənmə yanaşması, insanlara itlərlə ünsiyyət qurduqları kimi toxunma, jestlər və danışıq əmrlərindən istifadə edərək robotlara rəhbərlik etməyə imkan verir.
Məqalənin ilk müəllifi Taerim Yoon Tech Xplore-a bildirib ki, “Bu tədqiqat itlərin insanlarla davamlı qarşılıqlı əlaqə yolu ilə yeni davranışları necə öyrənməsindən ilhamlanıb. İtlər təcrid olunmuş şəkildə öyrənmirlər – onlar fiziki rəhbərlik və sosial işarələr vasitəsilə müşahidə edir, izləyirlər və uyğunlaşırlar. Bu, bizi sadə bir sual verməyə vadar etdi: robotlar da oxşar şəkildə öyrədilə bilərmi?”Robotu təkərlər arasında ziqzaq hərəkətinə yönəltmək üçün təlimat çubuğundan istifadə edərək cazibə yolu ilə məlumatların toplanması. Müəllif: Yoon və digərləri, RILAB (Koreya Universiteti), Hesablama Robototexnika Laboratoriyası (ETH Sürix)
İnsan qarşılıqlı təsiri vasitəsilə robotun davranışının formalaşdırılması
Yun və həmkarlarının bu işinin əsas məqsədi insan istifadəçilərinin ayaqlı robotlarla itlərlə necə qarşılıqlı əlaqədə olduqlarına bənzər şəkildə qarşılıqlı əlaqədə olmasına imkan verəcək bir strategiya hazırlamaq idi. Tədqiqatçılar peşəkar it təlimçilərini müşahidə etməklə və onların itlərə yeni bacarıqlar öyrətməyə çalışdıqlarından nümunə götürməklə başladılar.
“Biz it təlimçilərinin tez-tez itləri cəlb etmək və onların davranışlarını formalaşdırmaq üçün şirniyyat və ya oyuncaqlardan istifadə etdiyini müşahidə etdik”, – deyə Yun izah etdi. “Zaman keçdikcə, davranış öyrənildikdən sonra it bu bacarıqları mükafatlar olmadan belə yerinə yetirə və əmrlərə birbaşa cavab verə bilər. Bizim yanaşmamız da oxşar prinsipə əsaslanır.”
Tədqiqatçılar şirniyyatlara və ya oyuncaqlara etibar etmək əvəzinə, robotun təlim zamanı izlədiyi mükafat olaraq təlim çubuğundan istifadə etdilər. Robot insan istifadəçisi ilə qarşılıqlı əlaqədə olmaqla və bu fiziki təlimatı izləməklə yeni bacarıq və davranışlar öyrənir.
“Robot bu davranışları öyrəndikdən sonra artıq təlim çubuğuna ehtiyac duymur və yalnız jestlərə və şifahi əmrlərə birbaşa cavab verə bilir”, – deyə Yun bildirib. “Daha texniki baxımdan, biz məlumatların səmərəliliyinə diqqət yetirdik, çünki insanlardan qarşılıqlı əlaqə məlumatlarını dəfələrlə toplamaq tez bir zamanda ağırlaşa bilər.”
Tədqiqatçılar tərəfindən hazırlanmış çərçivəyə həmçinin robotun insanlarla simulyasiya yolu ilə qarşılıqlı əlaqədə olduğu səhnələri yenidən yaradan səhnə rekonstruksiyası modulu da daxildir. Bu səhnələr robotun insanlarla bir neçə real dünya qarşılıqlı əlaqəsindən sonra müstəqil olaraq yeni davranışlar tətbiq edə biləcəyi təlim mühitləri kimi xidmət edir.
Komanda öz çərçivələrini əsl dörd ayaqlı robota tətbiq etdi və çox ümidverici nəticələr əldə etdiyini aşkar etdi. Robot istifadəçiyə yaxınlaşmaq, maneələrin üzərindən tullanmaq, kimisə izləmək və maneələrin ətrafında ziqzaq hərəkətləri etmək kimi yeni davranışları tez bir zamanda mənimsəyə bildi və tapşırığın uğur nisbəti 97,15% oldu.
Bacarıqları daha sürətli mənimsəyən daha ağıllı ayaqlı robotlara doğru
Bu yaxınlarda aparılan tədqiqat, ayaqlı robotların təlimini sadələşdirə və sürətləndirə biləcək, eyni zamanda onların insanlarla qarşılıqlı əlaqələrini daha intuitiv edə biləcək innovativ bir yanaşma təqdim edir. Çərçivə tezliklə daha da təkmilləşdirilə, digər ayaqlı robotlara tətbiq oluna və daha geniş tapşırıqlar üzərində sınaqdan keçirilə bilər.
Yun bildirib ki, “Robotlar gündəlik ev mühitinə nüfuz etməyə başlayır. İstehsalçılar geniş çeşiddə daxili bacarıqlar təqdim etsələr belə, mürəkkəb insan mühitlərində işləyərkən həmişə məhdudiyyətlər olacaq. İstifadəçilərə yeni davranışları birbaşa öyrətməyə imkan vermək güclü alternativ ola bilər.”
“Əgər robotlar istənilən davranışları proqramlaşdırma və ya mütəxəssis müdaxiləsi əvəzinə təbii qarşılıqlı təsir yolu ilə öyrənə bilsələr, qeyri-peşəkar istifadəçilər robotları öz ehtiyaclarına daha asanlıqla uyğunlaşdıra bilərlər.”
Komandanın it təlimindən ilhamlanan yeni robot təlim yanaşması, robotların daha gündəlik mühitlərdə istifadəsinə potensial olaraq töhfə verə bilər. Tədqiqatçılar indiyə qədər robotlara müəyyən yollarla hərəkət etməyi öyrətməyə diqqət yetirsələr də, indi bu çərçivələri obyektləri manipulyasiya etməyi tələb edən tapşırıqlara da tətbiq etməyə çalışacaqlar.
Yun əlavə etdi: “Tezliklə hərəkət və obyekt qarşılıqlı təsirini birləşdirən lokomotiv-manipulyasiya tapşırıqlarını da həll etmək istərdik”.
“Bu baxımdan, biz bu qarşılıqlı təsirə əsaslanan tədris çərçivəsini humanoid robotlara da genişləndirməyi planlaşdırırıq ki, bu da istifadəçilərə fiziki qarşılıqlı təsir vasitəsilə daha mürəkkəb, bütün bədən davranışlarını öyrətməyə və sonra onları jestlər və şifahi əmrlər vasitəsilə idarə etməyə imkan verir. Uzunmüddətli məqsədimiz təbii insan qarşılıqlı təsiri vasitəsilə davamlı olaraq yeni bacarıqlar öyrənə bilən və gündəlik həyatda insanlarla problemsiz şəkildə birlikdə yaşaya bilən robotlar yaratmaqdır.”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Sadie Harley tərəfindən redaktə edilmiş və Robert Egan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmişdir — bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Taerim Yoon və digərləri, Robotları İtlər Kimi Öyrətmək: Cazibə, Jest və Nitqdən Çevik Naviqasiyanı Öyrənmək, arXiv (2026). DOI: 10.48550/arxiv.2601.08422
Jurnal məlumatı: arXiv
© 2026 Science X Network