














Fil robotu bioinspired 3D çap texnologiyasını nümayiş etdirir
Ecole Polytechnique Federale de Lausanne tərəfindən
Stefani Baum tərəfindən redaktə edilmişdir , Andrew Zinin tərəfindən nəzərdən keçirilmişdir
Redaktorların qeydləriŞəbəkəli kas-iskelet robotu konsepsiyası. Kredit: Elmdə irəliləyişlər (2025). DOI: 10.1126/sciadv.adu9856
Çitanın güclü sprinti, ilanın çevik sürüşməsi və ya insanın mahir qavrayışı: Hər biri yumşaq və sərt toxumalar arasında qüsursuz qarşılıqlı əlaqə sayəsində mümkün olur. Əzələlər, vətərlər, bağlar və sümüklər bütün heyvanlar aləmində görülən kompleks hərəkətləri yerinə yetirmək üçün lazım olan enerji, dəqiqlik və hərəkət aralığını təmin etmək üçün birlikdə işləyirlər.
Bu əzələ-skelet sistemi müxtəlifliyini robototexnikada təkrarlamaq olduqca çətindir. İndiyədək çoxlu materiallardan istifadə etməklə 3D çap yumşaq sərt robotlar yaratmağın bir yolu olmuşdur və bu yanaşma bioloji toxumaların müxtəlifliyini təqlid etsə də, bu o deməkdir ki, sərtlik və ya yükdaşıma gücü kimi əsas xüsusiyyətlər robot quruluşunda davamlı olaraq idarə oluna bilməz.
İndi EPFL-in Mühəndislik Məktəbində Hesablama Robotlarının Dizaynı və İstehsal Laboratoriyasında (CREATE) Josie Hughes tərəfindən başçılıq etdiyi komanda bioloji toxumaların müxtəlifliyini robot nəzarəti və dəqiqliklə birləşdirən yenilikçi qəfəs strukturu hazırlayıb. Sadə köpük materialından hazırlanmış qəfəs müxtəlif forma və mövqelərə malik olmaq üçün proqramlaşdırıla bilən fərdi bölmələrdən (hüceyrələrdən) ibarətdir. Bu hüceyrələr bir milyondan çox fərqli konfiqurasiya ala bilər və hətta sonsuz həndəsi variasiyalar əldə etmək üçün birləşdirilə bilər.Oyna
00:00
00:20SəssizParametrlərPIPTam ekrana daxil olun
OynaKredit: Elmdə irəliləyişlər (2025). DOI: 10.1126/sciadv.adu9856
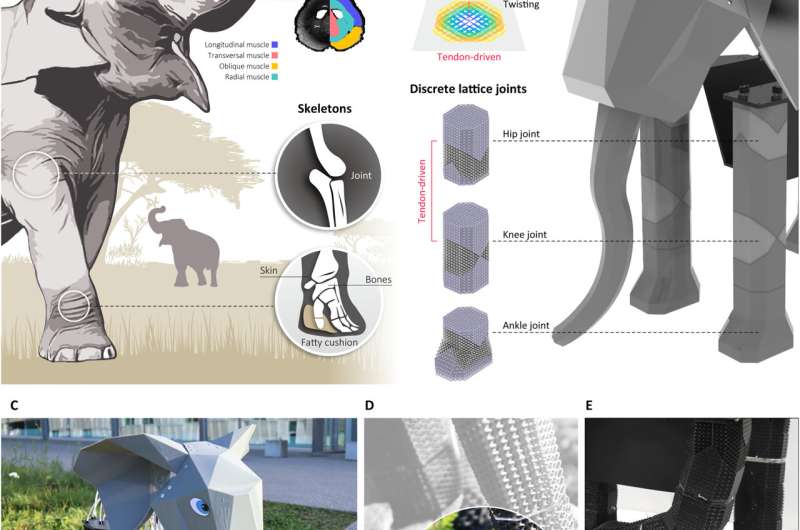
Doktorluqdan sonrakı tədqiqatçı Qinghua Quan deyir: “Biz öz proqramlaşdırıla bilən qəfəs texnikamızdan əzələ-skelet sistemindən ilham alan, yumşaq gövdəsi, bükülə, əyilə və dönə bilən, eləcə də daha sərt omba, diz və ayaq oynaqları olan fil robotu yaratmaq üçün istifadə etdik”. “Bu, bizim metodumuzun görünməmiş dərəcədə yüngül, uyğunlaşa bilən robotların dizaynı üçün genişlənə bilən həll təklif etdiyini göstərir.”
Tədqiqat Science Advances jurnalında dərc olunub .EleBot. Kredit: 2025 CREATE EPFL. CC BY SA 4.0
İki proqramlaşdırma ölçüsü; sonsuz həndəsi dəyişikliklər
Komandanın proqramlaşdırıla bilən qəfəsi müxtəlif həndəsələrə malik iki əsas hüceyrə növündən istifadə etməklə çap edilə bilər: bədən mərkəzli kub (BCC) hüceyrəsi və X kubu. Hər bir hüceyrə növü robotik “toxumanı” 3D-çap etmək üçün istifadə edildikdə, yaranan şəbəkə fərqli sərtlik, deformasiya və yükdaşıma xüsusiyyətlərinə malikdir. Lakin CREATE Lab metodu həm də onlara forması BCC və X kubu arasındakı spektrin hər hansı yerində olan hibrid hüceyrələrdən hazırlanmış qəfəsləri çap etməyə imkan verir.
“Bu yanaşma sərtlik profillərinin fasiləsiz məkanda qarışdırılmasına imkan verir və sonsuz sayda qarışıq vahid hüceyrələrin əldə edilməsinə imkan verir. O, xüsusilə fil gövdəsi kimi əzələ orqanlarının strukturunu təkrarlamaq üçün uyğundur “, – Ph.D. tələbə Benhui Dai.
Alimlər hər bir hüceyrənin formasını modulyasiya etməklə yanaşı, onların qəfəsdəki mövqeyini də proqramlaşdıra bilərlər. Bu ikinci proqramlaşdırma ölçüsü onlara hər bir hüceyrəni öz oxu boyunca fırlatmağa və köçürməyə (tərcümə etməyə) imkan verir. Hüceyrələr hətta tamamilə yeni hüceyrə birləşmələri yaratmaq üçün bir-birinin üzərinə qoyula bilər və nəticədə meydana gələn şəbəkəyə daha da geniş mexaniki xüsusiyyətlər verir. Potensial variasiyaların şəffaf miqyası haqqında fikir vermək üçün dörd üst-üstə qoyulmuş hüceyrəsi olan bir qəfəs kubu beş hüceyrə üçün 75 milyondan çox konfiqurasiya ilə təxminən 4 milyon mümkün konfiqurasiya verə bilər.Oyna
00:11
00:18SəssizParametrlərPIPTam ekrana daxil olun
OynaKredit: Elmdə irəliləyişlər (2025). DOI: 10.1126/sciadv.adu9856
Suya davamlı və sensora hazırdır
Onların fil modeli üçün bu ikili proqramlaşdırma qabiliyyəti, sürüşən müstəvi birləşmə (ayağın kiçik sümüklərində tapılır), əyilmə biroxlu oynaq (dizdə tapılır) və ikitərəfli əyilmə biaxial oynaq (ayaq barmaqlarında tapılır) daxil olmaqla, unikal hərəkət diapazonuna malik bir neçə müxtəlif toxuma növlərinin istehsalına imkan verdi.
Komanda hətta burulma, əyilmə və fırlanma hərəkətlərinə həsr olunmuş ayrı-ayrı qəfəs bölmələri hazırlayaraq filin əzələ gövdəsinin mürəkkəb hərəkətini təkrarlaya bildi, eyni zamanda onlar arasında hamar və davamlı keçidlər təmin etdi.
Hughes deyir ki, köpük materialını dəyişdirmək və ya yeni hüceyrə formalarını daxil etməklə yanaşı, onların unikal köpük qəfəs texnologiyası strukturu gələcək robototexnika tədqiqatları üçün bir çox maraqlı imkanlar təqdim edir.
“Pətək kimi, şəbəkənin gücü-çəki nisbəti çox yüksək ola bilər ki, bu da çox yüngül və səmərəli robotlara imkan verir. Açıq köpük strukturu mayelərdə hərəkət etmək üçün çox uyğundur və hətta köpüklər haqqında əlavə kəşfiyyat təmin etmək üçün struktura sensorlar kimi digər materialları da daxil etmək potensialını təklif edir.”
Daha çox məlumat: Qinghua Guan və digərləri, Şəbəkə Strukturu Musculoskeletal Robotlar: Proqramlaşdırıla bilən həndəsi topologiya və anizotropiyadan istifadə, Elmdə irəliləyişlər (2025). DOI: 10.1126/sciadv.adu9856
Jurnal məlumatı: Elmin inkişafı Ecole Polytechnique Federale de Lausanne tərəfindən təmin edilmişdir

