‘FlyingToolbox’ dron sistemi hava axınının müdaxiləsinə baxmayaraq, havada dəqiq alət mübadiləsinə nail olur
Krystal Kasal , Phys.org
Gaby Clark tərəfindən redaktə edilmiş , Robert Eqan tərəfindən nəzərdən keçirilmişdir
Redaktorların qeydləriAparat sistemi. Kredit: Təbiət (2025). DOI: 10.1038/s41586-025-09575-x
Uçan manipulyator robotları sənaye texniki qulluq və ya tikinti kimi bir çox tətbiqlərdə faydalı olduqlarını göstərdilər. Çətin əlçatan və ya təhlükəli yerlərdə onların faydalı olması onları xüsusilə insanları riskə atan tətbiqlərdə perspektivli edir. Bu maşınlar illər ərzində davamlı olaraq təkmilləşsə də, müəyyən sahələrdə hələ də çatışmazlıqlar var.
Keçmişdə pilotsuz təyyarələr üçün çətinliklərdən biri uçuş zamanı bir-birinin üstünə yığmaq və birgə işləmək bacarığı idi. Bu qabiliyyət, tibb bacısının prosedur zamanı həkimə müxtəlif alətlər verməsi kimi alətlərin dəyişdirilməsi kimi şeylər üçün faydalıdır – həkimə (və ya manipulyator dronuna) fasiləsiz işləməyə imkan verir.
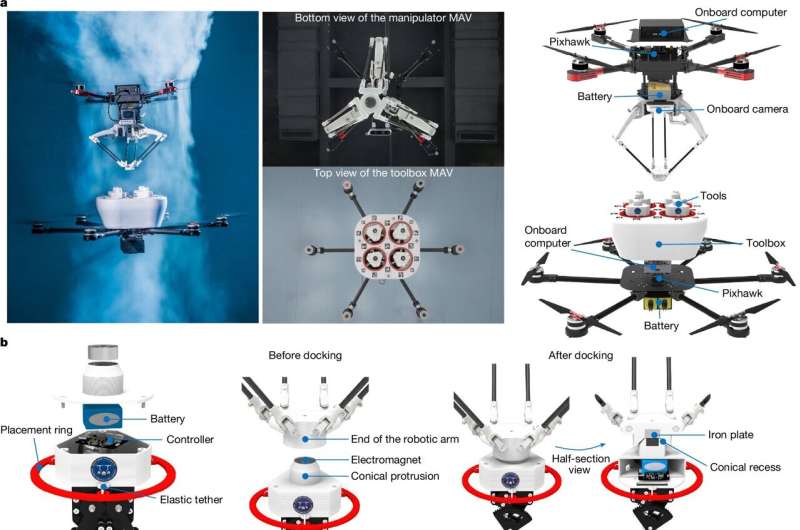
Çətinlik “downwash” adlanan bir şeydən irəli gəlir ki, bu da iki dron arasında yaranan və onların dəqiq hərəkətlərinə və yerləşdirmə prosedurlarına mane olan güclü hava hərəkətidir. Bununla belə, Çinin Westlake Universitetinin tədqiqatçılar qrupu uçarkən təsirli dəqiqliklə alətləri mübadilə edə bilən yeni mikro-hava nəqliyyat vasitələri (MAV) sistemi hazırlayıb. “FlyingToolbox” üzərindəki dizayn və eksperimental sınaqlar Nature jurnalında dərc olunan yeni tədqiqatlarında sənədləşdirilib .
FlyingToolbox robotik qol manipulyatoru MAV ilə birlikdə çoxsaylı alətləri saxlayan MAV-dan ibarətdir. Sistem dəqiq nisbi yerləşdirmə üçün bortda görmə (QR kodu izləmə), real vaxtda aşağı yuyulma pozuntularını proqnozlaşdırmaq və kompensasiya etmək üçün neyroşəbəkə əsaslı qiymətləndiricidən və alətin bərkidilməsi üçün elastik bağları olan elektromaqnit dok mexanizmindən istifadə edir.Oyna
01:18
02:00SəssizParametrlərPIPTam ekrana daxil olun
OynaÇox vəzifəli kooperativ hava manipulyasiyası: 1 manipulyator MAV + 1 alətlər qutusu MAV. Bu video kooperativ manipulyasiya tapşırığının tam prosedurunu göstərir, burada bir manipulyator MAV tam avtonom şəkildə alətlər qutusunun dəstəyi ilə çox mərhələli manipulyasiya tapşırıqlarını yerinə yetirir. Bu tapşırıqda MAV manipulyatoru əvvəlcə qayçı aləti quraşdırdı və qayçıdan istifadə edərək simi kəsdi. Sonradan o, qayçı alətini buraxdı və daha sonra obyekti bir yerdən digər yerə götürmək və yerləşdirmək üçün istifadə edilən tutucu alətə keçdi. Kredit: Təbiət (2025). DOI: 10.1038/s41586-025-09575-x
“Doklama prosesində MAV manipulyatorunun pervaneleri altındakı MAV alətlər qutusunda davamlı və intensiv aşağı yuyulma pozğunluqları yaradır. Məsələn, iki MAV arasında şaquli məsafə 0,6 m olduqda, aşağı yuyulma sürəti 13,18 m/s-ə çata bilər ki, bu da şəhərə mənfi təsir göstərir. Alətlər qutusunun MAV çəkisinin 40,2%-i (6,32 kq) aşağı yuyulma hava axınına qarşı çıxmaq üçün induksiya edilmiş pozğunluq qüvvəsini və fırlanma momentini hesablamaq və kompensasiya etmək vacibdir”, – deyə tədqiqat müəllifləri izah edirlər.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=2520359048&adf=2278794688&pi=t.ma~as.2793866484&w=750&fwrn=4&fwrnh=0&lmt=1759824372&rafmt=1&armr=3&format=750×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-10-flyingtoolbox-drone-accurate-mid-air.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&aieuf=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTQwLjAuNzMzOS4xMjgiLG51bGwsMCxudWxsLCI2NCIsW1siQ2hyb21pdW0iLCIxNDAuMC43MzM5LjEyOCJdLFsiTm90PUE_QnJhbmQiLCIyNC4wLjAuMCJdLFsiR29vZ2xlIENocm9tZSIsIjE0MC4wLjczMzkuMTI4Il1dLDBd&abgtt=6&dt=1759824372671&bpp=1&bdt=1170&idt=304&shv=r20251006&mjsv=m202510020101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1759481674%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1759481674%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3D878d521b85743f4c%3AT%3D1751526237%3ART%3D1759481674%3AS%3DAA-AfjZCLruwaFzoQORvGPwXS3Y2&prev_fmts=0x0&nras=1&correlator=2239051069224&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=448&ady=2583&biw=1905&bih=945&scr_x=0&scr_y=0&eid=31095048%2C31095049%2C31095054%2C31095055%2C31095082%2C95367554%2C95370627%2C95372358%2C95360684%2C95368093&oid=2&pvsid=8502740355194269&tmod=1105690755&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&plas=164x742_l%7C164x742_r&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=314
Sistemin aşağı yuyulma gücünü kompensasiya edə biləcəyini yoxlamaq üçün komanda həm stasionar, həm də hərəkət edən alətlər qutusu dronları ilə çoxmərhələli tapşırıqlar və alətlərin dəyişdirilməsi təcrübələri həyata keçirdi və sonra dəqiqlik və təkrarlanma qabiliyyətini yoxlamaq üçün 20 ardıcıl dok sınaqları keçirdi.
Çoxmərhələli tapşırıqlar sistemin uçuş zamanı keçid qabiliyyətinə malik olduğunu uğurla sübut etməklə kifayətlənmədi , həm də FlyingToolbox hətta 13,18 m/s-ə qədər güclü eniş zamanı belə, 0,80 ± 0,33 sm-lik alt santimetr dok dəqiqliyinə nail oldu. Komanda deyir ki, bu, 6-8 sm arasında dəqiqlik əldə edən oxşar sistemlərin dəqiqliyi ilə müqayisədə böyük irəliləyişdir.
FlyingToolbox, bir çox potensial tətbiqləri ilə uçan manipulyator robotları dünyasında irəliyə doğru böyük bir addım kimi görünür , lakin hələ də aradan qaldırılmalı olan bir neçə maneə var. Məsələn, dron sistemi idarə olunan laboratoriyada sınaqdan keçirilib, ona görə də açıq hava şəraitində işləmək daha çətin ola bilər.
Bununla belə, komanda irəliləyişdən razıdır. Onlar deyirlər ki, “Sistemin dəqiqliyi, möhkəmliyi və çox yönlü olması onu real işlərin geniş spektri üçün potensial həll yoluna çevirir. Biz inanırıq ki, o, cəmiyyəti mürəkkəb kooperativ hava manipulyasiya sistemlərini inkişaf etdirməyə ruhlandıra bilər, məsələn, batareyaların dəyişdirilməsi və materialların doldurulması, hava manipulyatorlarının imkanlarını əhəmiyyətli dərəcədə genişləndirir.”
Sizin üçün müəllifimiz Kristal Kasal tərəfindən yazılmış , Gaby Clark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Huazi Cao et al, Şaquli şəkildə yığılmış dronlarla proksimal kooperativ hava manipulyasiyası, Təbiət (2025). DOI: 10.1038/s41586-025-09575-x
Jurnal məlumatı: Təbiət
© 2025 Science X Network