Hər kəs indi robot öyrədə bilər: Yeni alət öyrətmə bacarıqlarını praktiki və asan edir
Jennifer Chu, Massaçusets Texnologiya İnstitutu
Sadie Harley tərəfindən redaktə edilmişdir , Andrew Zinin tərəfindən nəzərdən keçirilmişdir
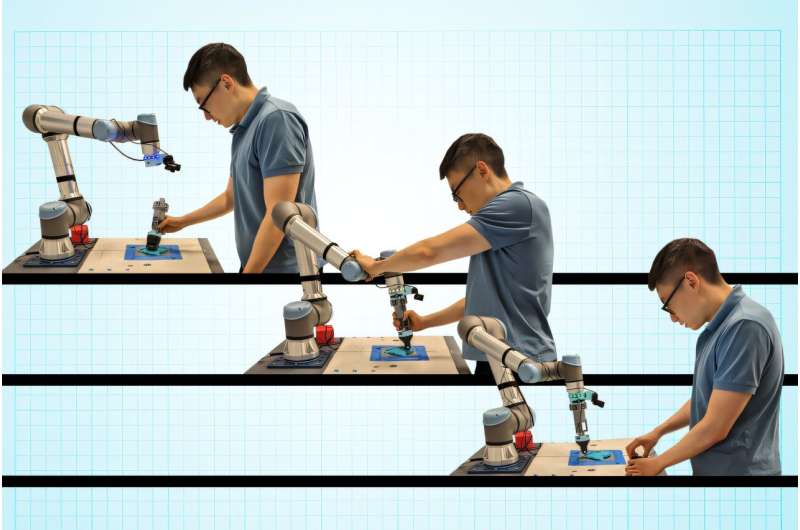
Redaktorların qeydləriMIT mühəndisləri tərəfindən hazırlanmış yeni əl interfeysi insana üç təlim yanaşmasından hər hansı birini istifadə edərək robota yeni bacarıqlar öyrətməyə imkan verir: təbii tədris (yuxarı sol), kinestetik təlim (orta) və teleoperasiya. Kredit: Massaçusets Texnologiya İnstitutu
Bir robota yeni bacarıqların öyrədilməsi kodlaşdırma təcrübəsi tələb edirdi. Ancaq yeni nəsil robotlar potensial olaraq hər kəsdən öyrənə bilər.
Mühəndislər “nümayişdən öyrənə” bilən robot köməkçilər hazırlayırlar. Bu daha təbii təlim strategiyası insana adətən üç yoldan biri ilə bir tapşırığı yerinə yetirməyə imkan verir: uzaqdan idarəetmə vasitəsilə , məsələn , robotu uzaqdan manevr etmək üçün joystiklə; robotu hərəkətlər vasitəsilə fiziki olaraq hərəkət etdirərək; ya da robot baxarkən və təqlid edərkən tapşırığı özləri yerinə yetirməklə.
Öyrənməklə məşğul olan robotlar adətən bu üç nümayiş yanaşmasından yalnız birində məşq edirlər. Lakin MIT mühəndisləri indi robota üç təlim metodundan hər hansı biri vasitəsilə tapşırığı öyrənməyə imkan verən üçü birdə bir təlim interfeysi hazırlayıblar.
İnterfeys bir çox ümumi əməkdaşlıq robot qollarına qoşula bilən əl, sensorla təchiz edilmiş alət şəklindədir. Şəxs robotu uzaqdan idarə etməklə, fiziki manipulyasiya etməklə və ya tapşırığı özləri nümayiş etdirməklə (hansı üsluba üstünlük versə və ya tapşırığa ən uyğun gəlirsə) robota tapşırığı yerinə yetirməyi öyrətmək üçün qoşmadan istifadə edə bilər.
MIT komandası, “çox yönlü nümayiş interfeysi” adlandırdıqları yeni aləti standart birgə robot qolunda sınaqdan keçirdi. İstehsal sahəsində təcrübəyə malik olan könüllülər adətən zavod mərtəbələrində yerinə yetirilən iki əl işi yerinə yetirmək üçün interfeysdən istifadə etdilər.
Tədqiqatçılar deyirlər ki, yeni interfeys robotlarla qarşılıqlı əlaqədə olan istifadəçilərin və “müəllimlərin” növünü genişləndirə biləcək artan təlim çevikliyi təklif edir. O, həmçinin robotlara daha geniş bacarıqlar toplusunu öyrənməyə imkan verə bilər. Məsələn, bir şəxs uzaqdan bir robotu zəhərli maddələrlə işləmək üçün öyrədə bilər, istehsal xəttinin daha aşağı hissəsində isə başqa bir şəxs robotu fiziki olaraq məhsulu qablaşdırma hərəkətləri ilə hərəkət etdirə bilər və xəttin sonunda başqa biri qoşmadan istifadə edərək, robot baxır və eyni şeyi etməyi öyrənir.
MİT-in Aeronavtika və Astronavtika Departamentində postdokant Mike Hagenow deyir: “Biz mürəkkəb işi görmək üçün insanlarla effektiv işləyə bilən yüksək intellektli və bacarıqlı komanda yoldaşları yaratmağa çalışırıq”. “Biz inanırıq ki, çevik nümayiş alətləri istehsal səviyyəsindən çox kənarda, evdə və ya baxım şəraiti kimi robotların mənimsənilməsinin artmasına ümid etdiyimiz digər sahələrdə də kömək edə bilər.”
Hagenow oktyabrda keçiriləcək IEEE Ağıllı Robotlar və Sistemlər (IROS) konfransında yeni interfeysin təfərrüatlarını əks etdirən məruzə təqdim edəcək . Sənəd həmçinin arXiv preprint serverində dərc olunur.
Məqalənin MIT həmmüəllifləri MIT Kompüter Elmləri və Süni İntellekt Laboratoriyasının (CSAIL) postdoktu Dimosthenis Kontogiorgosdur; Yanwei Wang, Ph.D., bu yaxınlarda elektrik mühəndisliyi və kompüter elmləri üzrə doktorluq dərəcəsi qazanmışdır ; və Julie Shah, MIT professoru və Aeronavtika və Astronavtika Departamentinin rəhbəri.
Birlikdə məşq
MIT-dəki Şah qrupu iş yerində, xəstəxanada və evdə insanlarla birlikdə işləyə bilən robotlar hazırlayır. Onun tədqiqatının əsas istiqaməti insanlara robotlara yeni tapşırıqlar və ya bacarıqları, sanki “iş yerində” öyrətməyə imkan verən sistemlərin inkişafıdır.
Bu cür sistemlər, məsələn, fabrikdə işləyən işçiyə robotun proqram təminatını sıfırdan yenidən proqramlaşdırmaq üçün fasilə verməkdənsə, robotun manevrlərini tez və təbii şəkildə tənzimləməyə kömək edəcək ki, bu da işçinin mütləq malik olmaya bilər.
Komandanın yeni işi robotların daha təbii, intuitiv üsullarla öyrədilməsi üçün nəzərdə tutulduğu “nümayişdən öyrənmə” və ya LfD adlı robot öyrənməsində yeni yaranan strategiyaya əsaslanır.
LfD ədəbiyyatını nəzərdən keçirərkən Hagenow və Şah tapdılar ki, indiyə qədər hazırlanmış LfD təlim metodları ümumiyyətlə teleoperasiya, kinestetik təlim və təbii təlim kimi üç əsas kateqoriyaya düşür.
Bir təlim metodu müəyyən bir şəxs və ya tapşırıq üçün digər ikisindən daha yaxşı işləyə bilər. Şah və Hagenow robotun daha çox insandan daha çox tapşırıq öyrənməsinə imkan yaratmaq üçün hər üç üsulu birləşdirən bir alət hazırlaya biləcəkləri ilə maraqlandılar.
Hagenow deyir: “Əgər kiminsə robotla qarşılıqlı əlaqədə olmaq istəyə biləcəyi bu üç fərqli yolu bir araya gətirə bilsək, bu, müxtəlif vəzifələr və fərqli insanlar üçün fayda gətirə bilər”.
Əlinizdə olan tapşırıqlar
Bu məqsədi nəzərə alaraq, komanda yeni çox yönlü nümayiş interfeysi (VDI) hazırladı. İnterfeys tipik birgə robot qolunun qoluna uyğunlaşa bilən əl qoşqudur. Qoşma kamera və zamanla alətin mövqeyini və hərəkətlərini izləyən markerlər, həmçinin verilən tapşırıq zamanı tətbiq olunan təzyiqin miqdarını ölçmək üçün güc sensorları ilə təchiz olunub.
İnterfeys robota qoşulduqda, bütün robot uzaqdan idarə oluna bilər və interfeysin kamerası robotun hərəkətlərini qeyd edir və robot öz başına tapşırığı öyrənmək üçün təlim məlumatları kimi istifadə edə bilər. Eynilə, insan interfeysi əlavə etməklə robotu fiziki olaraq bir tapşırıq yerinə yetirə bilər.
İstənilən işi yerinə yetirmək üçün VDI ayrıca şəxs tərəfindən ayrıla və fiziki olaraq tutula bilər. Kamera VDI-nin hərəkətlərini qeyd edir, robot VBI yenidən qoşulduqda tapşırığı təqlid etmək üçün də istifadə edə bilər.
Qoşmanın yararlılığını yoxlamaq üçün komanda interfeysi birgə robot qolu ilə birlikdə yerli innovasiya mərkəzinə gətirdi, burada istehsal mütəxəssisləri fabrik-zamin proseslərini təkmilləşdirə biləcək texnologiyanı öyrənir və sınaqdan keçirir.
Tədqiqatçılar bir təcrübə qurdular və burada mərkəzdəki könüllülərdən iki ümumi istehsal tapşırığını yerinə yetirmək üçün robotdan və interfeysin hər üç təlim metodundan istifadə etmələrini istədilər: presləmə və qəlibləmə. Pres-fitinqdə istifadəçi robotu bir çox bərkitmə işlərinə bənzər dirəkləri basıb deşiklərə yerləşdirməyi öyrətdi.
Kalıplama üçün bir könüllü robota bəzi termoqəlibləmə tapşırıqlarına bənzər rezin, xəmirə bənzər bir maddəni mərkəz çubuğun səthi ətrafında bərabər şəkildə itələyib yuvarlamağı öyrətdi.
İki tapşırığın hər biri üçün könüllülərdən üç təlim metodunun hər birindən istifadə etmələri istəndi , əvvəlcə robotu joystik vasitəsilə teleoperasiya etməli, sonra robotu kinestetik manipulyasiya etməli və nəhayət, robotun qoşqusunu ayıraraq, robot qoşmanın gücünü və hərəkətlərini qeyd edərkən, tapşırığı “təbii” şəkildə yerinə yetirmək üçün istifadə etməlidir.
Tədqiqatçılar könüllülərin teleoperasiya və kinestetik təlimdən daha çox təbii üsula üstünlük verdiyini müəyyən ediblər. İstehsal üzrə mütəxəssislər olan istifadəçilər, hər bir metodun digərlərindən üstün ola biləcəyi ssenarilər təklif etdilər. Məsələn, təhlükəli və ya zəhərli maddələrlə işləmək üçün bir robota təlim vermək üçün teleoperasiyaya üstünlük verilə bilər .
Kinestetik təlim işçilərə ağır paketləri daşımaq tapşırığı olan robotun yerini tənzimləməyə kömək edə bilər. Təbii təlim incə və dəqiq manevrləri əhatə edən tapşırıqları nümayiş etdirməkdə faydalı ola bilər.
İstifadəçi rəyi əsasında qoşmanın dizaynını təkmilləşdirməyi planlaşdıran və robot öyrənmə qabiliyyətini sınamaq üçün yeni dizayndan istifadə edən Hagenow deyir: “Biz nümayiş interfeysimizdən bir robotun müəyyən növ nümayişlərdən faydalanan bir sıra tapşırıqlarda kömək edə biləcəyi çevik istehsal mühitlərində istifadə etməyi təsəvvür edirik”.
“Biz bu araşdırmanı son istifadəçilərin tədris zamanı robotlarla qarşılıqlı əlaqəsini genişləndirən interfeyslər vasitəsilə birgə robotlarda daha çox çevikliyin əldə oluna biləcəyini nümayiş etdirmək kimi görürük.”
Daha çox məlumat: Michael Hagenow və digərləri, Çox yönlü nümayiş interfeysi: Daha Çevik Robot Nümayiş Kolleksiyasına doğru, arXiv (2024). DOI: 10.48550/arxiv.2410.19141
Jurnal məlumatı: arXiv Massaçusets Texnologiya İnstitutu tərəfindən təmin edilmişdir