














Hava mikrorobotu arı kimi sürətlə uça bilir
Adam Zewe, Massaçusets Texnologiya İnstitutu
Stefani Baum tərəfindən redaktə edilmiş , Robert Eqan tərəfindən nəzərdən keçirilmişdir
Redaktorların qeydləriÇenin qrupu beş ildən çoxdur ki, robot həşəratlar yaradır. Kredit: MIT Soft and Micro Robotics Laboratory
Gələcəkdə dağıdıcı zəlzələdən sonra dağıntılar altında qalan sağ qalanların axtarışına kömək etmək üçün kiçik uçan robotlar yerləşdirilə bilər. Əsl həşəratlar kimi, bu robotlar daha böyük robotların çata bilmədiyi dar məkanlarda uça bilir, eyni zamanda stasionar maneələrdən və düşən dağıntı parçalarından yayına bilir.
İndiyə qədər hava mikrorobotları həqiqi həşəratların sürətli, çevik uçuşundan uzaq, hamar trayektoriyalar üzrə yavaş-yavaş uça biliblər.
MIT tədqiqatçıları bioloji analoqları ilə müqayisə oluna biləcək sürət və çevikliklə uça bilən hava mikrorobotlarını nümayiş etdiriblər. Birgə qrup robot səhv üçün yeni süni intellektə əsaslanan nəzarətçi hazırladı ki, bu da ona gimnastika uçuş yollarını izləməyə imkan verdi, məsələn, davamlı bədən sürüşmələrini yerinə yetirmək.
Yüksək performansı hesablama səmərəliliyi ilə birləşdirən iki hissəli idarəetmə sxemi ilə robotun sürəti və sürətlənməsi tədqiqatçıların əvvəlki ən yaxşı nümayişləri ilə müqayisədə müvafiq olaraq təxminən 450% və 250% artıb.
Sürətli robot, külək pozğunluqları onu kursdan çıxarmaqla hədələsə belə, 11 saniyə ərzində ardıcıl 10 salto vurmaq üçün kifayət qədər çevik idi.
“Biz bu robotları daha ənənəvi dörd helikopterli robotların uçmaqda çətinlik çəkəcəyi, lakin həşəratların naviqasiya edə biləcəyi ssenarilərdə istifadə etmək istəyirik. İndi bioinspired idarəetmə sistemimizlə robotumuzun uçuş performansı sürət, sürətlənmə və atış bucağı baxımından böcəklərlə müqayisə edilə bilər. Bu, gələcək hədəfə doğru olduqca maraqlı bir addımdır”. Elektrik Mühəndisliyi və Kompüter Elmləri Departamenti (EECS), Elektronikanın Tədqiqat Laboratoriyası (RLE) nəzdində Yumşaq və Mikro Robotlar Laboratoriyasının rəhbəri və robot haqqında məqalənin həm-baş müəllifidir.
Araşdırma “Science Advances” jurnalında dərc olunub .
Chen, EECS MIT aspirantı, aparıcı müəlliflər Yi-Hsuan Hsiao tərəfindən kağıza qoşulur; Andrea Tagliabue, Ph.D.; və Owen Matteson, Aeronavtika və Astronavtika Departamentinin (AeroAstro) aspirantı; eləcə də EECS aspirantı Suhan Kim; Tong Zhao; və baş müəllif Jonathan P. How, Ford Aeronavtika və Astronavtika Departamentinin Mühəndislik Professoru və İnformasiya və Qərar Sistemləri Laboratoriyasının (LIDS) əsas tədqiqatçısı.Oyna
00:00
03:18SəssizParametrlərPIPTam ekrana daxil olun
OynaKredit: Elmdə irəliləyişlər (2025). DOI: 10.1126/sciadv.aea8716
Süni intellekt nəzarətçisi
Çenin qrupu beş ildən çoxdur ki, robot həşəratlar yaradır.
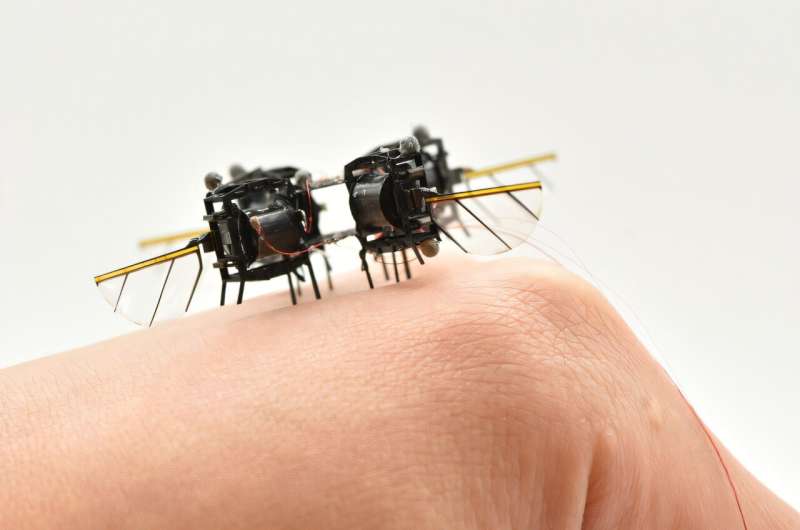
Onlar bu yaxınlarda kiçik robotlarının daha davamlı versiyasını , kağız klipindən daha az çəkisi olan mikrokasset ölçülü cihazı inkişaf etdirdilər. Yeni versiya daha çevik hərəkətlərə imkan verən daha böyük, çırpınan qanadlardan istifadə edir. Onlar qanadları çox sürətli bir şəkildə çırpan bir sıra squishy süni əzələlər tərəfindən gücləndirilir.
Lakin nəzarətçi – robotun öz mövqeyini təyin edən və hara uçacağını söyləyən “beyni” – robotun işini məhdudlaşdıran bir insan tərəfindən əl ilə tənzimləndi.
Robotun əsl böcək kimi sürətlə və aqressiv uçması üçün ona qeyri-müəyyənliyi hesablaya bilən və mürəkkəb optimallaşdırmaları tez yerinə yetirə bilən daha möhkəm nəzarətçi lazım idi.
Belə bir nəzarətçi, xüsusən də yüngül robotun mürəkkəb aerodinamikası ilə real vaxt rejimində yerləşdirmək üçün çox hesablama intensivliyi olardı.
Bu çətinliyin öhdəsindən gəlmək üçün Çenin qrupu How’s komandası ilə qüvvələri birləşdirdi və birlikdə mürəkkəb, sürətli manevrlər üçün lazım olan möhkəmliyi və real vaxt rejimində yerləşdirmə üçün lazım olan hesablama səmərəliliyini təmin edən iki addımlı, süni intellektə əsaslanan idarəetmə sxemi hazırladılar.
“Avadanlıq inkişafı nəzarətçini itələdi ki, proqram təminatı tərəfində daha çox şey edə bildik, lakin eyni zamanda, nəzarətçi inkişaf etdikcə, onların aparatla edə biləcəyi daha çox şey var idi. Kevinin komandası yeni imkanlar nümayiş etdirdikcə, biz onlardan istifadə edə biləcəyimizi nümayiş etdiririk”, – How deyir.Hızlandırılmış fotoda uçan mikrorobotun flip həyata keçirməsi göstərilir. Kredit: MIT Soft and Micro Robotics Laboratory
İlk addım üçün komanda model-proqnozlaşdırıcı nəzarətçi kimi tanınan şeyi qurdu. Bu tip güclü nəzarətçi robotun davranışını proqnozlaşdırmaq və trayektoriyanı təhlükəsiz şəkildə izləmək üçün optimal hərəkətlər seriyasını planlaşdırmaq üçün dinamik, riyazi modeldən istifadə edir.
Hesablama baxımından intensiv olsa da, havadan saltolar, sürətli dönüşlər və aqressiv bədən əyilməsi kimi çətin manevrləri planlaşdıra bilər. Bu yüksək performanslı planlayıcı həmçinin robotun tətbiq edə biləcəyi qüvvə və fırlanma momentinə dair məhdudiyyətləri nəzərə almaq üçün nəzərdə tutulmuşdur ki, bu da toqquşmaların qarşısını almaq üçün vacibdir.
Məsələn, ard-arda çoxlu fırlanmaları yerinə yetirmək üçün robotun sürətini elə yavaşlatmaq lazımdır ki, onun ilkin şərtləri yenidən çevirmə üçün tam uyğun olsun.
How deyir: “Əgər kiçik səhvlər baş verərsə və siz bu kiçik səhvlərlə bu dönməni 10 dəfə təkrarlamağa çalışsanız, robot sadəcə qəzaya uğrayacaq. Biz güclü uçuş idarəsinə sahib olmalıyıq”.
Onlar bu mütəxəssis planlayıcıdan dərin öyrənmə modelinə əsaslanan “siyasəti” öyrətmək, imitasiya öyrənmə adlanan proses vasitəsilə real vaxt rejimində robotu idarə etmək üçün istifadə edirlər. Siyasət robotun hara və necə uçacağını söyləyən qərar qəbul edən mühərrikdir.
Əslində, imitasiya-öyrənmə prosesi güclü nəzarətçini çox sürətli işləyə bilən hesablama baxımından səmərəli AI modelinə sıxışdırır.
Əsas odur ki, siyasətə aqressiv manevrlər üçün bilməli olduğu hər şeyi öyrədən kifayət qədər məşq məlumatı yaratmaq üçün ağıllı bir yola sahib idi.
How izah edir: “Güclü təlim metodu bu texnikanın gizli sousudur”.
Süni intellektə əsaslanan siyasət, itələmə qüvvəsi və fırlanma momentləri kimi real vaxt rejimində giriş və çıxış kimi robot mövqelərini alır.Kredit: MIT Soft and Micro Robotics Laboratory
Böcək kimi performans
Təcrübələrində bu iki addımlı yanaşma, həşərat miqyaslı robotun sürətlənmədə 255% artım nümayiş etdirərək 447% daha sürətli uçmasını təmin etdi. Robot 11 saniyə ərzində 10 salto vurmağı bacardı və kiçik robot heç vaxt planladığı trayektoriyadan 4 və ya 5 santimetrdən çox uzaqlaşa bilməyib.
Hsiao deyir: “Bu iş nümayiş etdirir ki, ənənəvi olaraq sürəti məhdud olan yumşaq və mikrorobotlar, təbii həşəratların və daha böyük robotların çevikliyinə yaxınlaşan çevikliyə nail olmaq üçün qabaqcıl idarəetmə alqoritmlərindən istifadə edə bilər və bu, multimodal hərəkət üçün yeni imkanlar açır”.
Tədqiqatçılar həmçinin böcəklərin çox aqressiv addım atması, müəyyən mövqeyə sürətlə uçması və sonra dayanmaq üçün başqa bir yol atması zamanı baş verən sakkad hərəkətini də nümayiş etdirə biliblər. Bu sürətli sürətlənmə və yavaşlama böcəklərin özlərini lokallaşdırmağa və aydın görmələrinə kömək edir.
“Bu biomimika uçuş davranışı gələcəkdə robotun göyərtəsində kameralar və sensorlar qoymağa başlayanda bizə kömək edə bilər” dedi Çen.
Mikrorobotların mürəkkəb hərəkəti qeydə alma sisteminə qoşulmadan açıq havada uça bilməsi üçün sensorlar və kameraların əlavə edilməsi gələcək işlərin əsas sahəsi olacaqdır.
Tədqiqatçılar, həmçinin bortda olan sensorların robotların bir-biri ilə toqquşmasının qarşısını almaq və ya naviqasiyanı əlaqələndirməkdə necə kömək edə biləcəyini öyrənmək istəyirlər.
“Mikro robototexnika icması üçün ümid edirəm ki, bu məqalə eyni zamanda yüksək performanslı və səmərəli yeni idarəetmə arxitekturasını inkişaf etdirə biləcəyimizi göstərməklə paradiqma dəyişikliyinə işarə edir” dedi Çen.Külək pozğunluqları onu kursdan çıxarmaq təhlükəsi yaratdıqda belə, sürətli bir robot 11 saniyə ərzində ardıcıl 10 salto vurmaq üçün kifayət qədər çevik idi. Kredit: MIT Soft and Micro Robotics Laboratory
“Bu iş xüsusilə təsir edicidir, çünki kiçik miqyaslı istehsalda nisbətən böyük istehsal dözümlülüklərindən, saniyədə 1 metrdən çox küləyin əsməsindən və hətta robotun təkrar-təkrar döndərmələri zamanı robotun ətrafına dolanan güc telindən irəli gələn böyük qeyri-müəyyənliklərə baxmayaraq, bu robotlar hələ də dəqiq dönmələr və sürətli dönüşlər həyata keçirirlər” dedi Mexanik Mühəndis Universitetinin professoru Sarah Bergine kim bu işlə məşğul olmayıb.
“Hazırda nəzarətçi robotun göyərtəsində deyil, xarici kompüterdə işləsə də, müəlliflər nümayiş etdirirlər ki, oxşar, lakin daha az dəqiq olan nəzarət siyasətləri həşərat miqyaslı robotda mövcud olan daha məhdud hesablamalarla belə mümkün ola bilər. Bu, həyəcanvericidir, çünki o, bioloji əlavə edən həmkarlarınınkinə yaxınlaşan çeviklik ilə gələcək həşərat miqyaslı robotlara işarə edir.”
Daha çox məlumat: Yi-Hsuan Hsiao və digərləri, dərindən öyrənilmiş möhkəm boru modeli proqnozlaşdırıcı nəzarət vasitəsilə həşərat miqyaslı çırpınan qanadlı hava robotlarında akrobatik manevrlər, Science Advances (2025). DOI: 10.1126/sciadv.aea8716
Jurnal məlumatı: Elmin inkişafı Massaçusets Texnologiya İnstitutu tərəfindən təmin edilmişdir

