İnsanabənzər robotlar yeni çərçivədən istifadə edərək 87% müvəffəqiyyətlə müxtəlif obyektləri etibarlı şəkildə manipulyasiya edir
Ingrid Fadelli , Phys.org
Sadie Harley tərəfindən redaktə edilmiş , Robert Eqan tərəfindən nəzərdən keçirilmişdir
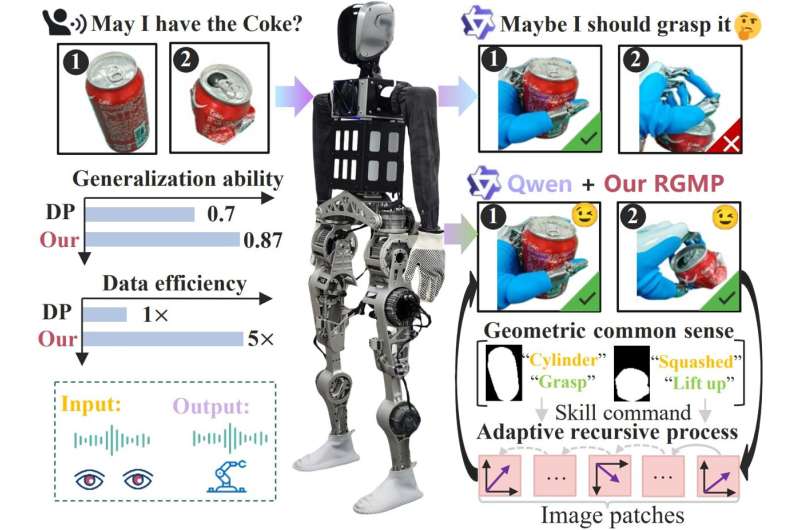
Redaktorların qeydləriRGMP-yə ümumi baxış. Kredit: arXiv (2025). DOI: 10.48550/arxiv.2511.09141
İnsanları həm görünüşlərində, həm də hərəkətlərində əks etdirən, həmçinin humanoid robotlar kimi tanınan robot sistemləri hazırda insan agentləri tərəfindən yerinə yetirilən bir çox vəzifənin öhdəsindən gəlmək üçün ən uyğun ola bilər. Bunlara təmizlik, səliqə-sahman və yemək bişirmək kimi ev işləri, həmçinin əşyaların daşınması və ya məhsulların yığılması daxildir.
Bu vəzifələri avtonom şəkildə yerinə yetirmək üçün insanabənzər robotlar müxtəlif vəziyyətlərdə müxtəlif obyektləri etibarlı şəkildə manipulyasiya edə bilməlidirlər. Robot manipulyasiyası üçün mövcud maşın öyrənmə modellərinin əksəriyyəti təlim zamanı rast gəlinən eyni parametrlərdə olduqda yaxşı işləyir, lakin əvvəllər görünməmiş ssenarilərdə zəif işləyir.
Wuhan Universitetinin tədqiqatçıları insanabənzər robotların obyekt manipulyasiya imkanlarını artıra bilən yeni çərçivə olan RGMP (təkrarlanan həndəsi-əvvəlki multimodal siyasət) işləyib hazırlayıblar. ArXiv preprint serverində dərc edilmiş məqalədə təqdim edilən bu çərçivə robotlara daha geniş obyektləri etibarlı şəkildə qavramağa və daha çox əl işlərini uğurla yerinə yetirməyə imkan verə bilər.
“Kağız insanabənzər robotların manipulyasiyasında müşahidə etdiyimiz çətinliklərdən, xüsusən də güclü performansa nail olmaq üçün böyük verilənlər toplusunu tələb edən cari məlumatlara əsaslanan yanaşmaların məhdudiyyətlərindən ilhamlanıb” dedi.
“Biz robot bacarıq seçiminə həndəsi düşüncəni daxil etməklə, görünməyən mühitlərdə daha yaxşı ümumiləşdirə bilən daha çox məlumat sərfəli metod inkişaf etdirməyi hədəflədik.”
RGMP çərçivəsinin təqdimatı
Li və həmkarlarının bu yaxınlarda apardıqları işin əsas məqsədi həndəsi-semantik mülahizələri insanabənzər robotların vizual-motor robot idarəetməsi ilə birləşdirən maşın öyrənmə modelini inkişaf etdirmək idi. Bu çərçivə robotların uyğunlaşma qabiliyyətini təkmilləşdirə bilər ki, bu da onlara kontekstlə əlaqəli məlumatları nəzərə alaraq, hətta kiçik verilənlər bazalarında təlim keçərkən müxtəlif parametrlərdə obyektləri etibarlı şəkildə manipulyasiya etməyə imkan verə bilər.
Komandanın çərçivəsi iki əsas əsas komponentdən ibarətdir. Birincisi həndəsi-əvvəlki bacarıq seçicisi (GSS), ikincisi isə adaptiv rekursiv Qauss şəbəkəsidir (ARGN).İnsan-robot qarşılıqlı əlaqə xətti. Kredit: arXiv (2025). DOI: 10.48550/arxiv.2511.09141
“GSS, robota obyektin forması və mövqeyinə əsaslanaraq uyğun bacarıqları seçməsinə kömək etmək üçün həndəsi prioritetləri görmə dili modelinə inteqrasiya edir” dedi Li.
“ARGN, digər tərəfdən, robot və onun qarşılıqlı əlaqədə olduğu obyektlər arasında məkan münasibətlərini rekursiv şəkildə modelləşdirməklə məlumatların səmərəli hərəkət sintezini təmin edir. Komponentlərin bu birləşməsi seyrək nümayişlər üzərində təlim problemini həll edərək, minimal məlumatla etibarlı tapşırığı yerinə yetirməyə imkan verir.”
Tədqiqatçılar öz çərçivələrini laboratoriyalarında hazırlanmış insanabənzər robotda və iki qollu masaüstü robotda yerləşdirərək bir sıra təcrübələrdə sınaqdan keçirdilər. Onların ilkin tapıntıları çox ümidverici idi, çünki onların çərçivəsi robotlara sınaqdan keçirildikləri ssenarilərin əksəriyyətində müxtəlif obyektləri uğurla manipulyasiya etməyə imkan verirdi.
“Bizim çərçivəmiz məkan əsaslandırmasını məlumatdan səmərəli öyrənmə ilə birləşdirir, ümumiləşdirmə testlərində 87% müvəffəqiyyət əldə edir və diffuziya siyasəti kimi ən müasir modellərdən 5 dəfə daha çox məlumat səmərəliliyi əldə edir” dedi Li.
Robototexnika tətbiqləri və gələcək tədqiqat istiqamətləri
Komandanın yeni təqdim etdiyi çərçivə tezliklə daha da təkmilləşdirilə və daha geniş insanabənzər robotlarda sınaqdan keçirilə bilər. Gələcəkdə bu robotların müxtəlif real dünya parametrlərində etibarlı şəkildə yerləşdirilməsinə töhfə verə bilər.
RGMP çərçivəsi, əlavə təlim tələb etmədən robotların görünməyən mühitlərə sürətlə uyğunlaşmasını tələb edən tapşırıqların avtomatlaşdırılması üçün xüsusilə faydalı ola bilər. Bunlara məişət tapşırıqları, müxtəlif xidmətlərin göstərilməsi və əl istehsalı prosesləri daxildir.
“Gələcək tədqiqatımız RGMP çərçivəsinin daha geniş müxtəlif tapşırıqlar üzrə ümumiləşdirmə qabiliyyətinin artırılmasına yönəldiləcək” dedi Li.
“Biz, həmçinin , dinamik mühitlərdə hərtərəfli tədris ehtiyacını daha da aradan qaldıraraq, robotlara minimal insan girişi və ya əvvəlki biliklərə əsaslanaraq yeni obyektlər üçün manipulyasiyalar çıxarmağa imkan verən tapşırıq üçün xüsusi hərəkət trayektoriyalarının avtomatik nəticələrini araşdırmağı planlaşdırırıq .”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Sadie Harley tərəfindən redaktə edilmiş və Robert Eqan tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Xuetao Li et al, RGMP: Ümumiləşdirilə bilən humanoid robot manipulyasiyası üçün təkrarlanan həndəsi-əvvəlki multimodal siyasət, arXiv (2025). DOI: 10.48550/arxiv.2511.09141
Jurnal məlumatı: arXiv
© 2025 Science X Network