














Leafbot: Çətin əraziləri fəth edən yumşaq robot
Yumşaq robototexnika, strukturlaşdırılmamış mühitlərdə naviqasiyada perspektivli uyğunlaşma qabiliyyəti ilə robot dünyasında inkişaf etməkdə olan bir sahədir. Ənənəvi robotların gözlənilməz ərazilərlə mübarizə apardığı yerlərdə yumşaq robotlar yüksək səviyyəli çeviklikləri sayəsində naviqasiya bacarıqlarında irəliləyirlər.
Belə transformativ dizaynlardan biri Yaponiya Qabaqcıl Elm və Texnologiya İnstitutunun (JAIST) tədqiqatçıları tərəfindən hazırlanmış yumşaq robot Leafbotdur. Professor Van Anh Honun rəhbərlik etdiyi və JAIST-də doktorluq kursu tələbələri Linh Viet Nguyen və Khoi Thanh Nguyeni cəlb edən tədqiqat qrupu Leafbotun müxtəlif qeyri-bərabər səthlər və ərazilərdə uyğunlaşma qabiliyyətini araşdırdı. Onların nəticələri IEEE Transactions on Robotics jurnalında dərc olunub .
“Yumşaq robotlar mürəkkəb və strukturlaşdırılmamış mühitlərdə naviqasiya qabiliyyətinə görə getdikcə daha çox tanınır, bu da onları yoxlama və kəşfiyyat kimi tətbiqlər üçün dəyərli edir. Vibrasiyaya əsaslanan hərəkətdən istifadə etməklə, biz minimal idarəetmə mexanizmləri ilə belə mürəkkəb maneələri dəf etməyə qadir bir robot hazırlamışıq”, – professor Ho deyir.
Ənənəvi vibrasiya əsaslı robotlar nizamsız əraziləri idarə etmək üçün çox vaxt mürəkkəb idarəetmə alqoritmlərini tələb edir. Bunun əksinə olaraq, Leafbot yamacları keçmək və maneələri keçmək üçün sadə, lakin effektiv hərəkət strategiyası ilə yumşaq materiallardan ibarət uyğun strukturundan istifadə edir.
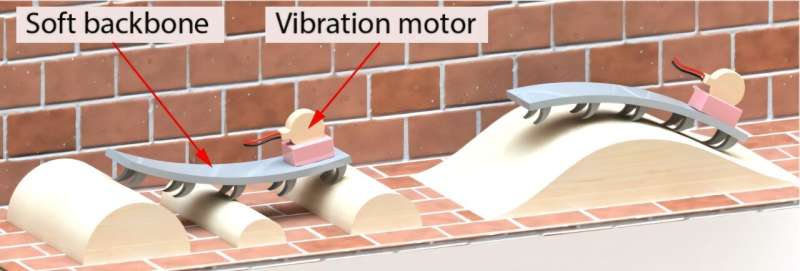
Komanda sürünmək üçün əzaları təkrarlamaq üçün bazasında əyri çıxıntıları olan yumşaq monolit silikon kauçukdan istifadə edərək Leafbotun strukturunu layihələndirdi. Yumşaq robotun gövdəsi daha sonra hərəkət üçün vibrasiya mexanizmini işə salmaq üçün vibrasiyalı mühərrikə birləşdirildi.
https://www.youtube.com/embed/XctFvyCtpMk?color=whiteKredit: Ho Lab
Leafbotun hərəkətinin arxasında duran fizikanı izah etmək üçün tədqiqat qrupu mərkəzdənqaçma qüvvələri, asimmetrik sürtünmə qarşılıqlı təsirləri və əzaların deformasiyası kimi amilləri özündə birləşdirən analitik model hazırlayıb. Tamamlayıcı sonlu elementlərin təhlili simulyasiyalarından istifadə edərək, onlar yumşaq strukturun müxtəlif ərazilərlə necə qarşılıqlı əlaqədə olması haqqında anlayışlarını daha da təkmilləşdirdilər.
https://googleads.g.doubleclick.net/pagead/ads?client=ca-pub-0536483524803400&output=html&h=188&slotname=2793866484&adk=1121470953&adf=746485419&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&lmt=1739868246&rafmt=11&format=750×188&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-02-leafbot-soft-robot-conquers-terrains.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTMyLjAuNjgzNC4xOTciLG51bGwsMCxudWxsLCI2NCIsW1siTm90IEEoQnJhbmQiLCI4LjAuMC4wIl0sWyJDaHJvbWl1bSIsIjEzMi4wLjY4MzQuMTk3Il0sWyJHb29nbGUgQ2hyb21lIiwiMTMyLjAuNjgzNC4xOTciXV0sMF0.&dt=1739868246271&bpp=1&bdt=111&idt=80&shv=r20250211&mjsv=m202502130101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1739866857%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1739866857%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1739866857%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0&nras=1&correlator=6175112999692&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=447&ady=2222&biw=1903&bih=945&scr_x=0&scr_y=0&eid=95352068%2C31088250%2C95347433%2C95350016&oid=2&pvsid=2010425464124846&tmod=76120815&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=85
“Biz morfologiyanın hərəkətə necə təsir etdiyini təhlil etməyi hədəflədik. Eksperimental nəticələr spesifik əza nümunələrinin çətin mənzərələrdə Leafbotun performansını necə optimallaşdırdığını təsvir edərək proqnozlarımızı təsdiqlədi”, – professor Ho əlavə edir.
Hesablama modelləşdirmə ilə yanaşı, tədqiqatçılar geniş empirik testlər apardılar. Yamaclar, yarımdairəvi maneələr və pilləli sahə əraziləri də daxil olmaqla müxtəlif ərazilərdə performans baxımından fərqli ekstremitələrin konfiqurasiyasına malik üç robot modeli müqayisə edilmişdir.
Onlar aşkar ediblər ki, robotun əyri üzvlərinin morfologiyası maneələri dəf etməkdə mühüm rol oynayıb, ona 30 dərəcəyə qədər olan yamacları, eləcə də yarımdairəvi maneələri keçməyə imkan verib. Bundan əlavə, nəzəri modelləşdirmə və eksperimental qiymətləndirmənin uğurlu inteqrasiyası Leafbotun dizaynının həm effektiv, həm də miqyaslı olmasını təmin etdi.
JAIST-in doktorantı, həmmüəllif Linh Viet Nguyen qeyd edir: “Dəqiq işə salınmaya əsaslanan sərt robotlardan fərqli olaraq, Leafbotun uyğunlaşma qabiliyyəti müxtəlif səthlərdə özünü tənzimləməyə imkan verir. Bu qabiliyyət onu məhdud və qeyri-bərabər məkanlarda hərəkətlilik tələb edən tətbiqlər üçün xüsusilə faydalı edir”.
. DOI: 10.1109/TRO.2025.3532499")
Bu innovativ robotik tədqiqatın nəticələri yalnız laboratoriya təcrübələri ilə məhdudlaşmır, lakin çox kənara çıxır və müxtəlif sahələrdə real dünyada tətbiqlərə imkan verir. Leafbotun uyğunlaşma qabiliyyəti, dağılmış dağıntıların və qeyri-bərabər torpaqların əhəmiyyətli problemlər yaratdığı fəlakətə məruz qalmış ərazilərdəki missiyalar üçün xüsusilə ümidverici ola bilər.
Bu robotlar qapalı məkanlarda naviqasiya etmək qabiliyyətinə malik olduğundan, onlar həmçinin boru kəmərlərini, yeraltı kəşfiyyatı və avtonom hərəkətlilik tələb edən digər sənaye parametrlərini yoxlamaq üçün istifadə edilə bilər. Bundan əlavə, bu dinamik robotlar zərif təsərrüfat ərazisini pozmadan dəqiq əkinçiliyə imkan verən torpaq analizi və məhsulun yoxlanılması kimi fəaliyyətlər üçün kənd təsərrüfatında tətbiqlər tapa bilər .
JAIST-in doktorantı, həmmüəllif Khoi Thanh Nguyen, onların nailiyyətlərinin əhəmiyyətini şərh edərək deyir: “Biz inanırıq ki, tədqiqatlarımızdan əldə edilən fikirlər, süni intellekt və maşın öyrənməsindəki irəliləyişlərlə birləşərək , işlərin minimal insan müdaxiləsi ilə yerinə yetirilməsinə imkan verə bilər.
“Sensial rəy sistemlərini inteqrasiya etməklə və onun enerji səmərəliliyini artırmaqla, biz Leafbot-un real vaxt rejimində əraziyə uyğunlaşma və qərar qəbul etməyə qadir olan, yumşaq robototexnika sahəsini dəyişdirən muxtar sistemə çevrilməsini nəzərdə tuturuq .”
Daha çox məlumat: Linh Viet Nguyen et al, Vibrasiya Mexanizmi ilə idarə olunan Monolitik Yumşaq Robotun Terradinamikası, IEEE Transactions on Robotics (2025). DOI: 10.1109/TRO.2025.3532499
Jurnal məlumatı: IEEE Transactions on Robotics Yaponiya Qabaqcıl Elm və Texnologiya İnstitutu tərəfindən təmin edilmişdir

