














Mikrorobotlar “süni məkan zamanları”nın köməyi ilə naviqasiya məhdudiyyətlərini dəf edirlər.
Krystal Kasal , Phys.org
Gaby Clark tərəfindən redaktə edilmiş , Robert Eqan tərəfindən nəzərdən keçirilmişdir
Redaktorların qeydləriReaktiv idarəetmə sahələrində hərəkət. Kredit: npj Robotics (2025). DOI: 10.1038/s44182-025-00058-9
Mikrorobotlar—ölçüsü bir millimetrdən az olan kiçik robotlar — məqsədyönlü dərman çatdırılması və ya mikro istehsal kimi digər alətlər üçün çox kiçik miqyasda tapşırıqların yerinə yetirilməsini tələb edən müxtəlif tətbiqlərdə faydalıdır. Bununla belə, bu robotları dizayn edən tədqiqatçılar və mühəndislər naviqasiyaya gəldikdə bəzi məhdudiyyətlərlə üzləşiblər. Təbiətdə nəşr olunan yeni bir araşdırma bu məhdudiyyətlərin yeni həllini təfərrüatlandırır və nəticələr ümidvericidir.
“Ağıllı” olmaq üçün çox kiçik
Mikrorobotlarla işləyərkən ən böyük problem yer çatışmazlığıdır. Onların kiçik ölçüləri bortda hesablama, hissetmə və işə salma üçün lazım olan komponentlərin istifadəsini məhdudlaşdırır və ənənəvi idarəetmə üsullarının həyata keçirilməsini çətinləşdirir. Nəticədə, mikrorobotlar öz böyük qohumları kimi “ağıllı” ola bilməzlər.
Tədqiqatçılar artıq bu məhdudiyyəti əhatə etməyə çalışıblar. Xüsusilə, iki üsul tədqiq edilmişdir. Mikrorobot idarəetmə üsullarından biri , adətən optik cımbızlar və ya elektromaqnit sahələri kimi bir şeylə köməkçi sistemdən xarici rəydən istifadə edir . Bu, mürəkkəb, çoxmərhələli və ya yüksək dəqiqlik tələb edən tapşırıqlar üçün faydalı olan kiçik sayda mikrorobotların dəqiq və uyğunlaşa bilən idarə edilməsini təmin etdi, lakin çoxlu sayda müstəqil mikrorobotların idarə edilməsi metodunun genişləndirilməsi daha az uğurlu oldu.
Digər tərəfdən, “reaktiv nəzarət” adlanan üsul daha çox sayda mikrorobotun idarə olunmasında vəd verdi. Tədqiqatın müəllifləri izah edirlər: “Daimi xarici rəyə güvənmək əvəzinə, onlar qlobal idarəetmə sahəsinə cavab olaraq robotun hərəkətlərini dərhal modulyasiya etmək üçün robotda olan sensor girişlərdən istifadə edirlər . Bu yanaşma minimalistdir və kiçik ölçülərinə görə tez-tez mürəkkəb hissetmə və ya hesablama qabiliyyəti olmayan mikrorobotlar üçün uyğundur.
“Ümumi nümunələr taksilərə nail olan stimullara cavab verən mikromotorlar, cəlbedici və itələyici qüvvələr vasitəsilə hərəkəti koordinasiya edən süni potensial sahələr və davranışları kollektiv qarşılıqlı təsirlər vasitəsilə ortaya çıxan mikrorobot dəstələridir.”
Bununla belə, reaktiv nəzarət üsulları indiyədək sadə davranışlarla məhdudlaşıb. Tədqiqatçılar strukturlaşdırılmış mühitlərdə naviqasiya etmək və ya robotları müxtəlif trayektoriyalardan istiqamətləndirərək müstəqil olaraq istənilən yerə yaxınlaşmaq kimi davranışlarla bağlı çətinliklərlə üzləşiblər.Oyna
00:00
00:32SəssizParametrlərPIPTam ekrana daxil olun
OynaGRIN dalğa bələdçisində robotlar. Kredit: npj Robotics (2025). DOI: 10.1038/s44182-025-00058-9
Ümumi nisbi nəzəriyyədən ilhamlanan həll
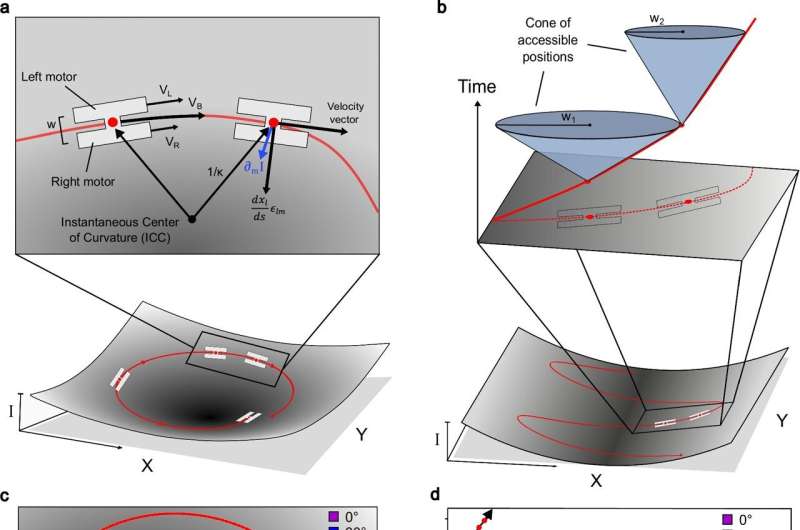
Təəccüblüdür ki, tədqiqatçılar robotların hərəkətinin formal olaraq işığın ümumi nisbilik nəzəriyyəsində keçdiyi yol ilə eyni olduğunu tapdılar ki, bu da onlara digər reaktiv idarəetmə üsullarında olduğu kimi, idarəetmə sahəsi ilə müəyyən edilmiş əyri kosmosda robotun hərəkətini geodeziya ilə əlaqələndirən riyazi çərçivə hazırlamağa imkan verdi . Komanda mürəkkəb mühitləri sadə virtual məkanlarla əlaqələndirmək üçün uyğun transformasiyalardan istifadə etdi, sonra idarəetmə sahələrini tərtib etdi və onları yenidən xəritələndirdi. Onlar yaranan həndəsi çərçivəyə “süni fəza zamanları” deyirlər.
Süni boş vaxtlardan istifadə edərək, komanda robotların daha mürəkkəb tapşırıqları yerinə yetirməsini təmin edə bildiklərini tapdı. Onlar izah edirlər: “Birincisi, maneəsiz mühitlərdə ibtidai davranışlar yaradan ölçüləri təqdim edirik. Bunlara müəyyən yerlərə naviqasiya, məhdudlaşdırma, bir-birindən ayrılma və ya müəyyən edilmiş üsullarla dönmə daxildir. Daha sonra konformal transformasiyalar altında geodeziya hərəkətinin dəyişməzliyindən istifadə edərək bu nəticələri sərhədləri olan boşluqlara genişləndirdik.”
Onların metodu müvəffəqiyyətlə onlara robotun divarlarla toqquşmasının qarşısını almağa və robotda hesablamalara ehtiyac olmadan naviqasiya, patrul, dönmə və ya dispersiya üçün göstərişlər verməyə imkan verdi. Onlar yanaşmanı həm simulyasiyalar, həm də silikon mikrorobotlar və proqnozlaşdırılan işıq sahələrindən istifadə etməklə sınaqdan keçirdilər. Eksperimental robotların hər biri silisium fotovoltaik massivlərdən ibarət iki mühərriki var idi və hadisə işığın intensivliyinə mütənasib sürətlə hərəkət edirdi.
Gələcəyin mikrorobotları
Nəhayət, bu yeni çərçivə çoxlu sayda sadə robotları idarə etmək üçün yeni, genişləndirilə bilən bir yol təklif edir – tibb, ətraf mühitin bərpası və mikro istehsal sahələrində imkanlar açır. Tədqiqat müəllifləri artıq 2D və xüsusi robot növləri ilə məhdudlaşan cari modeli təkmilləşdirməyin yollarını görürlər. Onlar deyirlər ki, “ümumiləşdirməyə doğru bir neçə perspektivli yol var”, məsələn, ölçüləri zamanla dəyişmək üçün genişləndirmək.
“Bu marşrut üzrə iş, ayrı-ayrı robotların müəyyən kosmos-zaman yerlərinə çatdıqda sürətlənməsinə və ya yavaşlamasına və ya yaxınlıqda olduqda bir-birindən gizlədilməsinə səbəb olaraq robotdan robota toqquşmanın qarşısını almaq və ya kosmosun ardıcıl tədqiqini hədəfləyə bilər” deyirlər.
Digər imkanlar arasında robot avadanlıqları baxımından şaxələnmə və ya hətta robotlara öz idarəetmə sahələrini yaratmağa icazə vermək, fövqəladə sürü davranışlarını təmin etmək daxildir.
Sizin üçün müəllifimiz Kristal Kasal tərəfindən yazılmış, Gaby Clark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Ətraflı məlumat: William H. Reinhardt və digərləri, Resurs məhdud robotların reaktiv idarəsi üçün süni boşluq vaxtı, npj Robotics (2025). DOI: 10.1038/s44182-025-00058-9
Jurnal məlumatları: npj Robotics , Nature
© 2025 Science X Network

