







Mikrorobotların mürəkkəb axınlarda muxtar naviqasiyası ilk dəfə nümayiş etdirilib
Nina Vogt, Leypsiq Universiteti tərəfindən
Lisa Lock tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
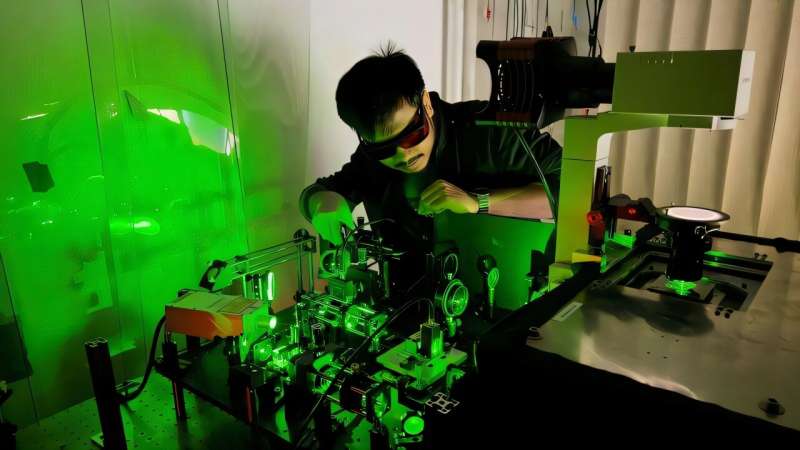
Dr. Diptabrata Paul, maşın öyrənməsinin və mikroüzgüçülərin maye axınlarında birləşdirildiyi eksperimental quruluşu tənzimləyir. Müəllif: Frank Cichos
Leypsiq Universitetinin tədqiqatçıları ilk dəfə olaraq kiçik sintetik mikroüzgüçülərin ətraf mühiti birbaşa öz bədən formaları vasitəsilə qavraya və sürətlə dəyişən maye axınlarına müstəqil şəkildə uyğunlaşa bildiklərini göstəriblər. Hazırda “Science Advances” jurnalında dərc olunan bu tədqiqat , ənənəvi sensorların sıradan çıxdığı çətin mühitlərdə idarəetməsi etibarlı şəkildə işləyən muxtar mikrosistemlər üçün yeni bir paradiqma yaradır. Bu, məsələn, dərmanların qan dövranına hədəflənmiş şəkildə çatdırılması üçün muxtar tibbi mikrorobotlar üçün yeni perspektivlər açır.
Leypsiq Universitetinin Yumşaq Maddə Fizikası üzrə Peter Debye İnstitutunun Molekulyar Nanofotonika Qrupundan professor Frank Cichosun rəhbərlik etdiyi tədqiqat qrupu, mürəkkəb axın sahələrində hərəkət edən mikroüzgüçüləri idarə etmək üçün gücləndirmə öyrənməsindən – maşın öyrənmə yanaşmasından – istifadə etdi. Mikroskopik hissəciklər, hərəkətlərinə qarşı çıxan axınlar haqqında birbaşa sensor məlumatlarına malik olmadıqları halda, alqoritmlərdən istifadə edərək uğurlu naviqasiya strategiyalarını öyrəndilər. Zərrəciklərin hər hərəkəti artıq ətrafdakı axının imzasını daşıdığı üçün onların bədənləri özləri sensorlar və beləliklə, alqoritm üçün məlumat bazası kimi xidmət edirdi.
Professor Çixos vurğulayır ki, “Bu iş bioloji ilham və praktik tətbiqi birləşdirir. Hərəkətli mikroorqanizmlər milyonlarla il ərzində fiziki quruluşlarından naviqasiya üçün istifadə etmək üçün təkamül keçiriblər. İndi biz göstəririk ki, maşın öyrənməsi oxşar strategiyaları sintetik sistemlərdə eksperimental olaraq mümkün olan zaman çərçivəsində kəşf edə bilər.”
Fizika mikroüzgüçülər üçün öyrənmə və qərar qəbuletmə sisteminə çevrilir
Tədqiqatçılar qızıl nanopartikullarla örtülmüş melamin hissəciklərini — sözdə sintetik mikroüzgüçülər (təxminən 1 mikrometr radiuslu) — real vaxt rejimində optik idarəetmə və maşın öyrənmə alqoritmləri ilə birləşdirdilər. Hissəciklər asimmetrik lazer işıqlandırması ilə hərəkətə gətirilir. Təlim mərhələləri zamanı onlar lazerlə induksiya edilən axınların yaratdığı hidrodinamik pozuntulara baxmayaraq hədəf yerlərinə çatmağı öyrənirlər.
Peter Debye İnstitutunun tədqiqatçısı Dr. Diptabrata Paul deyir: “Təcrübələrin özü olduqca çətin idi. Eyni zamanda öyrənmə alqoritmini öyrədərkən sabit real vaxt nəzarətinə nail olmalı idik – əsasən, mikroüzgüçülərə naviqasiya zamanı necə davranmağı öyrədirdik. Hissəciklər öz hərəkət sürətlərindən dörd dəfəyə qədər güclü axınlara məruz qalırlar, lakin onlar təxminən 50 təlim epizodunda uğurla naviqasiya etməyi öyrənirlər.”
Əsas fikir tədqiqatçıların ” təcəssüm olunmuş zəka ” adlandırdığı şeydə – fiziki strukturların və ətraf mühitlə qarşılıqlı təsirlərin alqoritmlər üçün hesablama resursları kimi xidmət edə biləcəyi prinsipindədir. Miniatürləşdirilmiş sensorlara və prosessorlara etibar etmək əvəzinə, mikroüzgüçülərin hərəkət dinamikası özləri informasiya prosessorlarına çevrilir.
Doktor Pol izah edir ki, “Bu, robot dizaynı ilə bağlı adi konsepsiyamızdan kökündən fərqlidir. Hər şeyi sensorlar vasitəsilə açıq şəkildə ələ keçirməyə və sonra reaksiyaları hesablamağa çalışmaq əvəzinə, bədən və ətraf mühit arasındakı fiziki qarşılıqlı təsir lazımi məlumatları əldə etmək üçün istifadə olunur. Öyrənmə alqoritmi bu təcəssüm olunmuş məlumatı necə oxumağı və ona necə cavab verməyi kəşf edir.”
Sensorsuz muxtar mikrosistemlər: Yeni bir paradiqma
Bu işin açıq hiss etmənin praktik olmayan və ya qeyri-mümkün olduğu tətbiqlər üçün əhəmiyyətli nəticələri var. Maks Plank İnsan Koqnitiv və Beyin Elmləri İnstitutundan Dr. Niko Şerf təklif edir: “İnsan bədənində dərmanların hədəf çatdırılmasını nəzərdən keçirin. Ənənəvi yanaşmalar əvvəlcədən proqramlaşdırılmış cavablara və ya xarici nəzarətə əsaslanır, lakin fizioloji axınlar mürəkkəb və gözlənilməzdir. Öz dinamikasından öyrənən mikrorobotlar potensial olaraq bədən daxilində avtonom hərəkət edə bilərlər.”
Tədqiqat həmçinin sürü robotları üçün yeni yollar açır : birdən çox mikrorobot kollektiv təcəssümlü zəka nümayiş etdirə bilər.
Doktor Pol yekun olaraq deyir: “Fiziki təcəssümü hesablama resursu kimi qəbul etdikdə nəyin mümkün olduğunu araşdırmağın yalnız başlanğıcındayıq. Bu iş prinsipi eksperimental olaraq nümayiş etdirir. Növbəti çətinlik bu ideyaları daha mürəkkəb mühitlərə və tapşırıqlara köçürməkdir.”
Nəşr detalları
Diptabrata Paul və digərləri, Fiziki təcəssüm aktiv maddədə açıq axın hissindən kənarda informasiya emalına imkan verir, Science Advances (2026). DOI: 10.1126/sciadv.aec0783
Jurnal məlumatları: Elmin irəliləyişləri
Əsas anlayışlar
Bioilhamlanmış yumşaq robotlarMuxtar robot lokomotiviLeypsiq Universiteti tərəfindən təmin edilir

