Mövcud sensorları maşın öyrənmə alqoritmləri ilə birləşdirmək robotların daxili toxunma hissini yaxşılaşdırır
Alman Aerokosmik Mərkəzinin Robototexnika və Mexatronika İnstitutunun robot mütəxəssisləri qrupu müəyyən edir ki, ənənəvi daxili güc-fırlanma anı sensorlarını maşın öyrənmə alqoritmləri ilə birləşdirmək robotlara toxunuşu hiss etmək üçün yeni üsul verə bilər.
“Science Robotics” jurnalında dərc olunan araşdırmada qrup robotlara süni dəri daxil olmayan toxunma hissi vermək üçün tamamilə yeni bir yanaşma tətbiq etdi.
Canlılar üçün toxunma ikitərəfli bir yoldur; bir şeyə toxunduqda onun toxumasını, temperaturunu və digər xüsusiyyətlərini hiss edirsən. Ancaq bədəninizin bir hissəsi ilə kimsə və ya başqa bir şey təmasda olduğu kimi sizə də toxuna bilərsiniz. Bu yeni araşdırmada tədqiqat qrupu daxili güc fırlanma anı sensorlarını maşın öyrənmə alqoritmi ilə birləşdirərək robotda sonuncu toxunma növünü təqlid etmək üçün bir yol tapdı.
https://www.youtube.com/embed/VpEu8Wm0zqg?color=whiteDinamik hərəkət zamanı çox nöqtəli algılama və toxunma tanınması. Kredit: Maged İskəndər
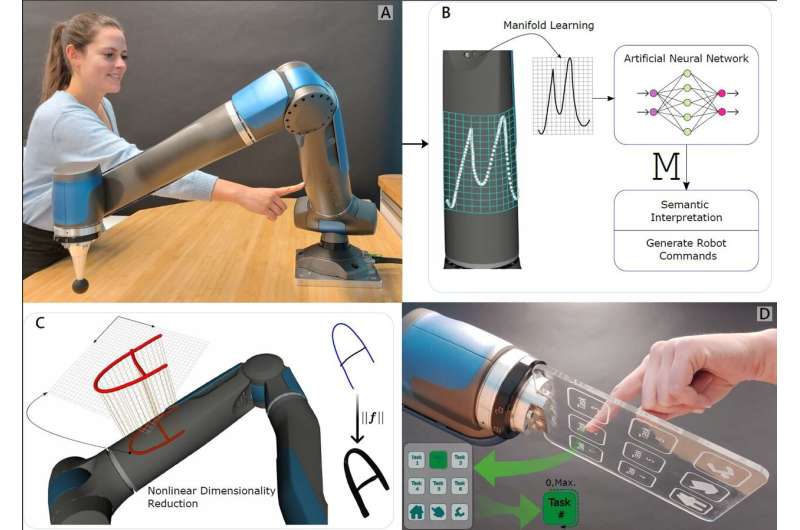
Toxunma duyğusunun çox hissəsinin fırlanma momenti (məsələn, barmaqlara təzyiq tətbiq edildiyi halda biləkdə hiss olunan gərginlik) ilə bağlı olduğunu qəbul edən tədqiqatçılar robot qolunun oynaqlarına həddindən artıq həssas güc-tork sensorları qoyurlar. Sensorlar eyni anda bir neçə istiqamətdən gələn qola tətbiq olunan təzyiqi aşkar edir.
Daha sonra robota müxtəlif gərginlik növlərini şərh etməyi öyrətmək üçün maşın öyrənmə proqramından istifadə etdilər. Bu, robota müxtəlif toxunma ssenarilərini tanımağa imkan verdi. Robot, məsələn, qolu boyunca müəyyən bir yerə toxunduqda deyə bildi. O, həmçinin bütün robotu süni sensor dəri ilə örtmək ehtiyacını aradan qaldırdı .
. Birinci rəqəmin yazılması üçün toxunma trayektoriyası tətbiq edilir, trayektoriya uğurla tanınır və təyin edilmiş tapşırıq müvafiq olaraq yerinə yetirilir. Eyni şəkildə üç rəqəminin tətbiqi müvafiq tapşırığın icrasına səbəb olur. Eyni şəkildə, yüksək səviyyəli tapşırıqları (B) təyin etmək üçün virtual funksional düymələr strukturun istənilən yerində yerləşdirilə bilər. Kredit: Maged İskəndər")
Tədqiqatçılar müəyyən ediblər ki, süni intellekt tətbiqi qolu o qədər həssas edir ki, o, qoluna çəkilmiş rəqəmlərdən hansının basıldığını müəyyən edə bilər və ya başqa halda barmaq ucu ilə bir adamın qoluna çəkdiyi rəqəmləri müəyyən edə bilər.
Bu yanaşma, bir çox növ robotlarla, xüsusən də insan yoldaşları ilə yaxından işləyən sənaye mühitlərində istifadə olunanlarla qarşılıqlı əlaqə qurmağın yeni yollarını aça bilər.
Daha çox məlumat: Maged İskəndər və digərləri, Intuitiv fiziki insan-robot qarşılıqlı əlaqəsi üçün daxili toxunma hissi, Elm Robotları (2024). DOI: 10.1126/scirobotics.adn4008
Jurnal məlumatı: Science Robotics