














Mühəndislər öz formasını paylanmış şəkildə yığa və təmir edə bilən robot dəstəsi qururlar
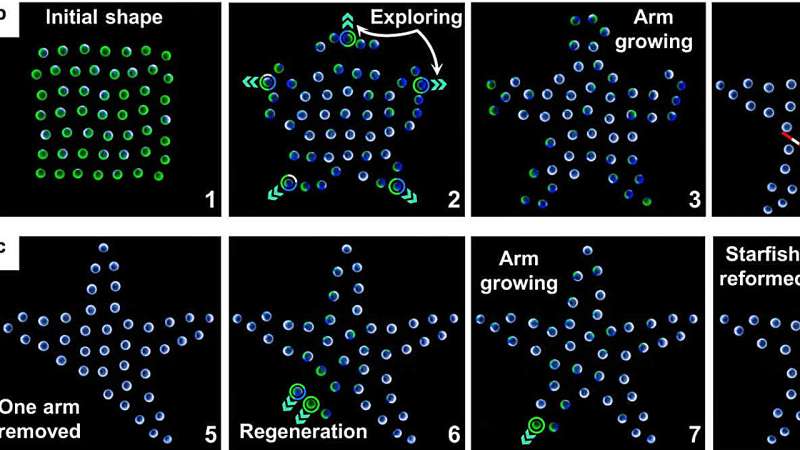
Tədqiqatçılar orta növbəli kəşfiyyat ideyasına əsaslanaraq robot dəstələrinin forma yığılması üçün yeni strategiya təklif etdilər: Robot qonşu robotlar və boş yerlərlə əhatə olunduqda, yaxınlıqdakı boş yerlərin ən yüksək sıxlığını tədqiq edərək indiki yerindən aktiv şəkildə imtina edir. istədiyiniz formada yerlər.
” Robot sürülərinin forma montajında orta yerdəyişmə kəşfiyyatı ” adlı araşdırma Nature Communications jurnalında dərc olunub .
Bu fikir, sıxlıq funksiyasının maksimumunu tapmaq üçün maşın öyrənməsində geniş istifadə olunan optimallaşdırma texnikası olan orta yerdəyişmə alqoritmini uyğunlaşdırmaqla həyata keçirilir .
Digər robotlar və boş yerlərlə əhatə olunduqda, robot orta yerdəyişmə optimallaşdırması ilə müəyyən edilən istənilən formada yaxınlıqdakı boş yerlərin ən yüksək sıxlığını araşdırır.
Təklif olunan strategiya 50 yer robotundan ibarət dəstələrlə aparılan təcrübələrlə təsdiqlənmişdir ki, bu da onun formanın bərpası, yüklərin birgə daşınması və mürəkkəb ətraf mühitin tədqiqi daxil olmaqla maraqlı davranışlar yaratmaq üçün uyğunlaşdırılma potensialını nümayiş etdirir .
Şeffild Universitetində Dr. Roderich Qross bu işdə Westlake Universiteti, Beihang Universiteti və Tsinghua Universitetinin tədqiqatçıları ilə əməkdaşlıq etmişdir.Oynamaq
00:0001:03SəssizParametrlərPIPTam ekrana daxil olun
Oynamaq50 robot ardıcıl olaraq beş hərf, “R”, “O”, “B”, “O”, “T” hərfi yığır. Kredit: Nature Communications (2023). DOI: 10.1038/s41467-023-39251-5
Daha çox məlumat: Guibin Sun et al, Robot sürülərinin forma montajında orta növbəli kəşfiyyat, Nature Communications (2023). DOI: 10.1038/s41467-023-39251-5
Jurnal məlumatı: Nature Communications Şeffild Universiteti tərəfindən təmin edilmişdir

