Qabaqcıl vizual lokalizasiya və topoqrafik xəritələşdirmə Zhurong roverinin Mars kəşfiyyatını gücləndirir
Birgə tədqiqat qrupu Çinin Zhurong roverinə Marsda naviqasiya və elmi araşdırmalar aparmağa imkan verən vizual lokalizasiya və topoqrafik xəritəçəkmə üsullarını təkmilləşdirib. Bu texnikalar Çinin ilk müstəqil planetlərarası kəşfiyyat səyi olan Tianwen-1 missiyasının uğurunda mühüm rol oynayıb.
Bu araşdırma IEEE Journal of Selected Mövzuların Tətbiqi Yer Müşahidələri və Uzaqdan Zondlama jurnalında dərc olunub . Tədqiqatçılar Çin Elmlər Akademiyasının Aerokosmik İnformasiya Tədqiqat İnstitutu və Pekin Aerokosmik İdarəetmə Mərkəzi ilə bağlıdır.
Çinin 2020-ci ilin iyul ayında işə salınan Tianwen-1 missiyasının məqsədi Marsın səthinin xəritəsini çəkmək, geoloji strukturları təhlil etmək və planetin iqlimi və ətraf mühitini öyrənmək olub. Bu missiyanın əsas komponenti 22 may 2021-ci ildə Utopiya Planitianın cənubuna enən Zhurong rover idi. Roverin Mars ərazisini keçmək və yerində elmi araşdırmalar aparmaq qabiliyyəti dəqiq lokalizasiyadan və yüksək ayırdetməli topoqrafik xəritədən çox asılı idi.
Bu araşdırmada tədqiqatçılar Zhurongun naviqasiya sistemini təkmilləşdirmək üçün bir sıra yeniliklər, o cümlədən vinyet korreksiyası və roverin Naviqasiya və Ərazi Kameraları tərəfindən çəkilmiş şəkillərin keyfiyyətini yaxşılaşdıran onlayn kamera mast kalibrləmə üsulları inkişaf etdirdilər. Bu təkmilləşdirmələr maneələrin təhlili və rover yolunun planlaşdırılması üçün vacib olan santimetr səviyyəli dəqiqliyə malik yüksək ayırdetmə qabiliyyətinə malik 3D topoqrafik xəritələrin yaradılmasına imkan verdi.
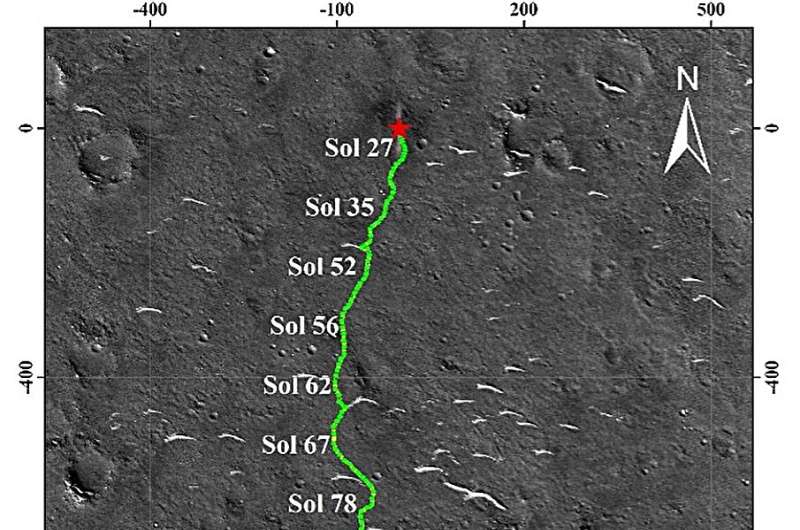
Bundan əlavə, saytlararası vizual lokalizasiya və rəqəmsal ortofoto xəritə uyğunluğunu birləşdirərək, tədqiqatçılar roverin mövqeyini travers uzunluğuna nisbətən 0,50% dəqiqliyə qədər dəqiqləşdirdilər, bu da roverin bortdakı ölü hesablama sisteminin 3,11% dəqiqliyindən əhəmiyyətli dərəcədə yaxşı idi.
Tədqiqat göstərir ki, Zhurong rover cəmi 2009 metr məsafə qət edib ki, bu da bort odometrinin qeyd etdiyi 1921 metrdən 88 metr çoxdur. Bu uyğunsuzluq marsda roverin hərəkətini başa düşmək üçün dəqiq lokalizasiyanın vacibliyini vurğulayaraq traversin enmə meylinə görə təkərin sürüşməsi nəticəsində yaranıb.
Bundan əlavə, yüksək ayırdetmə qabiliyyətinə malik topoqrafik xəritələr Marsın geoloji tarixi və iqlim təkamülü haqqında dəyərli fikirlər verən Transvers Aeolian Ridges və təsir kraterləri kimi geoloji xüsusiyyətlərin ətraflı təhlilini asanlaşdırdı .
Daha çox məlumat: Wenhui Wan və digərləri, Tianwen-1 Mars Missiyasında Zhurong Rover üçün Vizual Lokalizasiya və Topoqrafik Xəritəçəkmə, IEEE Tətbiqi Yer Müşahidələri və Uzaqdan Zondlamada Seçilmiş Mövzular Jurnalı (2025). DOI: 10.1109/JSTARS.2025.3540377
Çin Elmlər Akademiyası tərəfindən təmin edilmişdir