Qurdlar hissəcik süpürgəsi kimi: Ətraf mühitin nizamını zəka deyil, sadə hərəkət necə idarə edir

Amsterdam Universiteti tərəfindən
redaktə edən: Gaby Clark , rəy verən: Robert Egan
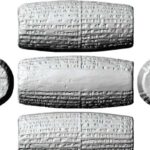
Redaktorların qeydləriPetri qabındakı əsl qurd (yuxarı solda) və robot qurd (aşağı sağda) ətraf mühitlərini çox oxşar şəkildə kiçik hissəciklərdən təmizləyirlər. Mənbə: Amsterdam Universiteti
Mikroskop altında kiçik qurdları müşahidə edərkən çox təəccüblü bir şey müşahidə etmək olar: qurdlar öz ətraf mühitlərini təmizləmək üçün geniş hərəkətlər edirlər. Amsterdam Universiteti, Corciya Texnologiya İnstitutu və Sorbonna Universiteti/CNRS-dəki fiziklər artıq bu gözlənilməz davranışın səbəbini aşkar ediblər.
Beyinsiz süpürmə
T. tubifex və ya Lumbriculus variegatus kimi santimetr uzunluğundakı su qurdları, millimetrdən kiçik qum hissəcikləri ilə doldurulmuş Petri qabına yerləşdirildikdə, təəccüblü bir şey baş verir. Zamanla qurdlar ətraflarını kortəbii şəkildə təmizləməyə başlayırlar. Onlar hissəcikləri kompakt qruplara çevirərək tədricən ətraf mühitlərini yenidən formalaşdırır və təşkil edirlər.
Bu həftə Physical Review X jurnalında dərc olunmuş bir araşdırmada bir qrup tədqiqatçı bu əlamətdar süpürmə davranışının beyinə və ya qurdlarla hissəciklər arasında hər hansı bir mürəkkəb qarşılıqlı təsirə ehtiyac duymadığını göstərir. Bunun əvəzinə, bu davranış qurdların sahib olduğu təbii dalğavari hərəkət və elastiklikdən irəli gəlir.
Tədqiqata Amsterdam Universitetindən Antuan Deblais və Corciya Texnologiya Universitetindən Saad Bhamla rəhbərlik ediblər. Deblais deyir ki, “Canlı qurdların sadəcə hərəkət edərək ətraflarını necə təşkil edə biləcəyini görmək çox maraqlıdır”. Bhamla əlavə edir ki, “Onların təkcə fəaliyyəti və elastikliyi hissəcikləri toplamaq və ətraf mühitlərini yenidən formalaşdırmaq üçün kifayətdir”.
Tədqiqatçılar canlı qurdları təqlid edən sadə robot və kompüter modelləri quraraq aşkar etdilər ki, yalnız bu iki inqrediyent – aktivlik və elastiklik – süpürmə və toplama effektlərini təkrarlamaq üçün kifayətdir. Nəticədə, sırf hərəkət və forma ilə idarə olunan öz-özünə təşkil olunmuş, dinamik ətraf mühitin yenidən qurulması forması yaranır.
Rosa Sinaasappel Amsterdam Universitetində robot təcrübələri aparıb. O izah edir ki, “Çevik rezin halqalarla birləşdirilmiş sadə beyinsiz robotlarla qurdların hərəkətini təqlid etməklə, süpürmə mexanizmi üçün vacib olan iki maddəni müəyyən edə bildik.”
Nizam ortaya çıxır
Nəticələr bizə qurdlar haqqında təəccüblü bir dərs verməklə kifayətlənmir. Bu orqanizmlərin hissəcikləri necə kortəbii şəkildə topladığını anlamağın daha geniş təsiri var. Texnoloji cəhətdən tədqiqatçıların öyrəndikləri sensorlara və ya əvvəlcədən proqramlaşdırılmış zəkaya ehtiyac olmadan materialları təmizləyən və ya çeşidləyən yumşaq robotların dizaynına ilham verə bilər.
Qurdlar kimi bu cür robotlar sadəcə hərəkət edər və hərəkətdən nizamın yaranmasına imkan verərdilər. Bu cür ” beyinsiz” maşınlar bəlkə də bir gün su mühitindən mikroplastiklərin və ya çöküntülərin təmizlənməsinə kömək edə bilər və ya gözlənilməz ərazilərdə mürəkkəb tapşırıqlar yerinə yetirə bilər.
Bioloji baxımdan, nəticələr həmçinin uzunsov canlı orqanizmlərin – təkcə qurdların deyil, həm də filamentli bakteriyaların və ya sitoskelet filamentlərinin – sadə fiziki qarşılıqlı təsirlər vasitəsilə öz yaşayış mühitlərini necə qura və dəyişdirə biləcəyinə dair fikirlər təqdim edir. Bu strukturlaşdırma və modifikasiya davranışını anlamaq, məsələn, torpaq qurdlarının torpaq aerasiyasındakı rolunu anlamaq üçün əsas sual olmuşdur.
Gündəlik məlumat üçün Phys.org-a etibar edən 100.000-dən çox abunəçi ilə elm, texnologiya və kosmosdakı ən son yenilikləri kəşf edin . Pulsuz bülletenimizə abunə olun və vacib olan nailiyyətlər, innovasiyalar və tədqiqatlar haqqında gündəlik və ya həftəlik yeniliklərdən xəbərdar olun .
Komanda səyi
Bu layihə canlı sistemlərin mərkəzləşdirilmiş nəzarət olmadan ətraf mühitlərini necə formalaşdırdığına dair maraqdan irəli gəldi. Corciya Texnologiya Universitetində Harri Tuazon tərəfindən aparılan qurdlarla aparılan ilkin təcrübələr gözlənilməz hissəcik toplama nümunələrini göstərdi. Bu, komandanın davranışı robot və simulyasiya edilmiş analoqlardan istifadə edərək təkrarlamağa çalışmasına səbəb oldu – bu da təəccüblü dərəcədə yaxşı işlədi. Layihədə təcrübəçilər və nəzəriyyəçilər yan-yana çalışdılar və komandaya bu məqsədyönlü davranışın arxasındakı fiziki prinsipləri aşkar etməyə imkan verdilər.
Georgia Tech-dən KR Prathusha davranışın kompüter simulyasiyalarını həyata keçirdi. O izah edir ki, ” İtələmə və elastiklik kimi sadə maddələr üzərində qurulmuş hesablama modelimiz göstərir ki, bu prinsip müxtəlif miqyaslarda işləyir və proqramlaşdırılmış zəka olmadan hissəcikləri avtonom şəkildə “təmizləyən” və yenidən təşkil edən yumşaq robot süpürgəçi ilə nümayiş etdirildiyi kimi, yeni dizaynlar üçün uyğunlaşdırıla bilər.”
Tədqiqatçılar gələcəkdə bu tip davranışı araşdırmağa davam edəcəklər. Aktiv süpürmənin riyazi modeli hazırda sadə formada təqdim olunsa da, bu mürəkkəb sistemin qaldırdığı bir çox çətin suallar nəzəriyyəçilər üçün açıq qalır.
Bir neçə tələbə qrupu laboratoriyada layihələr həyata keçirərək robot təcrübələrində böyük köməklik göstərdilər. Onların səyləri təcrübələrin aparılmasından tutmuş, bəlkə də ən çətin tapşırıqlardan biri olan onları uşaqlardan qorunan qablaşdırmadan çıxarmaqdan sonra ümumilikdə 200 batareya ilə əvəz etməyə qədər müxtəlif idi.
Daha çox məlumat: Anonim, Aktiv və canlı filamentlər tərəfindən hissəciklərin süpürülməsi və toplanması, Fiziki İcmal X (2025). DOI: 10.1103/yxp1-t43g
Jurnal məlumatı: Fiziki İcmal X
Amsterdam Universiteti tərəfindən təmin edilir