







Robot stolüstü tennis sistemi topun trayektoriyasını proqnozlaşdırır və yelləncəyi real vaxtda uyğunlaşdırır
Son onilliklər ərzində robotistlər xüsusi insan hərəkətlərini və davranışlarını diqqətəlayiq dəqiqliklə təkrarlaya bilən müxtəlif sistemlər təqdim etdilər. Bu robotlardan bəziləri hətta digər robotlarla və ya insanlarla müəyyən idman növlərində rəqabət apara bilər, məsələn, robotların bir-biri ilə futbol oynadığı beynəlxalq robot texnikası tədbiri olan RoboCup-da nümayiş etdirilən robotlar.
Massaçusets Texnologiya İnstitutunun (MIT) Biomimetic Robotics Laboratoriyasının tədqiqatçıları bu yaxınlarda stolüstü tennis raketi ilə topları uğurla və sürətlə vura bilən yeni robot stolüstü tennis platformasını təqdim ediblər. Onların arXiv preprint serverində dərc olunmuş məqalədə təsvir olunan platforması müxtəlif stolüstü tennis hit üslublarını canlandıra və topu müxtəlif istiqamətlərdə yüksək dəqiqliklə fırlada bilər.
“MIT-dəki Biomimetic Robotics Laboratoriyası həmişə Mini-Cheetah ilə göründüyü kimi həm aparatda, həm də idarəetmədə yeniliklər edərək, performanslı robot sistemləri yaratmağa çalışıb”, – məqalənin həmmüəllifi Kendrick Cancio Tech Xplore-a bildirib.
“Bizim Robototexnika və Süni İntellekt İnstitutu adından bu stolüstü tennis sistemini dinamik antropomorfik platformada stolüstü tennisdə insan paritetinə nail olmaq məqsədi ilə dinamik manipulyasiyanı araşdırmaq üçün platforma kimi yaratmaq imkanımız var idi.”
Biomimetic Robotics Lab robotların idarə edilməsinin iki əsas sahəsinə yönəlmiş tədqiqatlar aparır: dinamik ayaqlı hərəkət (yəni, ayaqlı robotların çevik hərəkəti) və obyektlərin sürətli manipulyasiyası. Robototexnika tədqiqatının bu iki sahəsi özünəməxsus problemləri ilə gəlir.
Ayaqlı robot hərəkətinə gəldikdə, əsas problem ətraf mühitdəki pozğunluqları effektiv şəkildə idarə etməkdir, uğurlu obyekt manipulyasiyası isə arzu olunan manevrləri dəqiq yerinə yetirməyi tələb edir.Oyna
00:0000:12SəssizParametrlərPIPTam ekrana daxil olun
“Stolüstü tennis, gələn top haqqında daha çox məlumat əldə olunduğu üçün tələb olunan uyğunlaşma və dəqiqliklə bu nəzarət problemləri arasındakı xətləri qarışdırır” dedi kağızın həmmüəllifi David Nguyen Tech Xplore. “Bu, bizim xüsusi robot texnikamızla parkdan çıxa biləcəyimizi düşündüyümüz çox unikal idarəetmə probleminə çevirir.”
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=2520359048&adf=1100001614&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&fwrnh=0&lmt=1748863012&rafmt=1&armr=3&format=750×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-05-robotic-table-tennis-ball-trajectory.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTM3LjAuNzE1MS41NSIsbnVsbCwwLG51bGwsIjY0IixbWyJHb29nbGUgQ2hyb21lIiwiMTM3LjAuNzE1MS41NSJdLFsiQ2hyb21pdW0iLCIxMzcuMC43MTUxLjU1Il0sWyJOb3QvQSlCcmFuZCIsIjI0LjAuMC4wIl1dLDBd&dt=1748863000781&bpp=1&bdt=389&idt=836&shv=r20250528&mjsv=m202505270101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1748863001%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1748863001%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1748863001%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0%2C1905x945&nras=2&correlator=7344984373672&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=448&ady=2406&biw=1905&bih=945&scr_x=0&scr_y=0&eid=31092756%2C95332924%2C95353387%2C95360391%2C95344789%2C95361617%2C95362173%2C95360684%2C95360294%2C95340252%2C95340254&oid=2&pvsid=8495463377265105&tmod=2063993230&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=11930
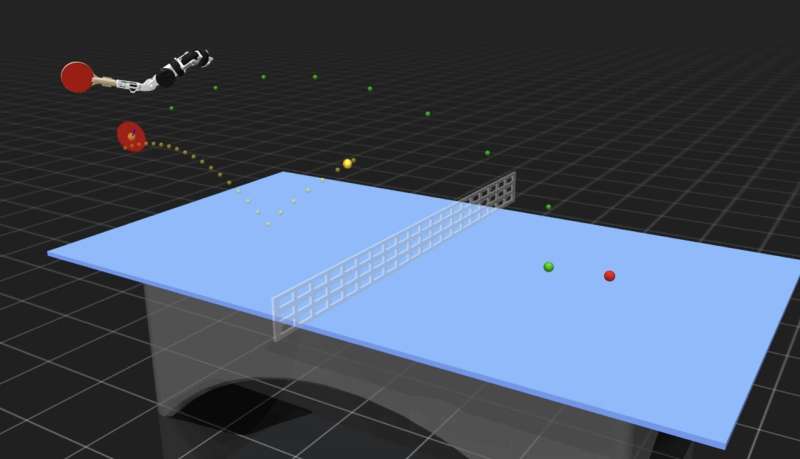
Nguyen, Cancio və Sangbae Kim tərəfindən hazırlanmış yeni platforma robot qol və idarəetmə alqoritmindən ibarətdir. Alqoritm daxil olan topun yolunu proqnozlaşdıra və raketi yelləyərkən topa vurmaq üçün qolun yerinə yetirməli olduğu hərəkətləri planlaşdıra, eyni zamanda müəyyən edilmiş zərbə şərtlərinə cavab verə bilər.
Nguyen izah etdi: “Hətta yellənərkən belə, qolun keçdiyi yol avarın topa doğru yerdə, sürətdə və oriyentasiyada çatmasını təmin etmək üçün dinamik olaraq yenilənir”.
“Biz tapdıq ki, gələcək fəaliyyətlərdən daha çox bütün yelləncək üçün planlaşdırma daha etibarlıdır, lakin qolumuzdan daha aqressiv manevrlər tələb edir. Bu, işimizin unikal üstünlüyüdür, çünki biz fərdi avadanlıqlarımızın hüdudlarını hazır sistemdən daha çox itələyə bilirik.”
Tədqiqatçılar tərəfindən hazırlanmış robot sistemlər qavrayış və hərəkətə keçirmə modulları adlanan iki əsas komponentə malikdir. Qavrayış modulu, tədqiqatçılar tərəfindən hazırlanmış xüsusi stolüstü tennis toplarını lokallaşdıra bilən, hazır hərəkət izləmə sistemindən ibarətdir.
“Biz gözlənilən zərbə yerini və vuruş vaxtını əldə etmək üçün topun trayektoriyasını proqnozlaşdırırıq” dedi Cancio.
“Eyni zamanda, bizim qeyri-xətti optimallaşdırma problemimiz var ki, bu da bu dəyərlərdən və qolun yelləncək trayektoriyası yaratmaq üçün topa necə vurmaq istədiyimizə dair məlumatdan istifadə edir. Bizim model proqnozlaşdırıcı nəzarətçimiz bu qol trayektoriyasını daim həll edir və topun yenilənmiş mövqelərini əldə etdikcə qola reaksiya verməyə imkan verir.”
Komandanın stolüstü tennis platformasına inteqrasiya olunmuş robot qolu MIT-də hazırlanmış insanabənzər qolun fərdiləşdirilmiş versiyasıdır. Bu qol yüksək fırlanma anı və aşağı rotor ətalətinə malikdir, bu iki xüsusiyyət ona nəinki tez yellənməyə, həm də topun trayektoriyası haqqında ilkin proqnozlar səhv olarsa, tez reaksiya verməyə və trayektoriyalarını uyğunlaşdırmağa imkan verir.
“Biz dinamik hərəkət edən obyekti dəqiq qarşılamaq üçün trayektoriyanı uyğunlaşdırmaq bacarığı nümayiş etdiririk” dedi Nguyen. “Stolüstü tennis heç bir insanın həyatını xilas etməyəcək olsa da, bu cür nəzarət humanoid kimi daha ümumi bir robotun obyekti tutması lazım ola biləcəyi çətin axtarış və xilasetmə vəziyyətlərində istifadə edilə bilər.”
Nguyen, Cancio və Kim öz robot stolüstü tennis platformasını bir sıra real təcrübələrdə qiymətləndirdilər və onun olduqca yaxşı çıxış etdiyini gördülər. Bu ilkin sınaqlarda robot qolu gələn topları 88% müvəffəqiyyət dərəcəsi və 11 m/s orta çıxış sürəti ilə vuraraq üç fərqli vuruş tərzinə əməl etdi.
 Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al,
Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al, Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al.
Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al. Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al,
Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al,- Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al,
- Yelləncək və top yolunun fotoşop şəkli. Kredit: Nguyen et al.
“Hazırda robototexnika ümumiyyətlə modelə əsaslanan yanaşmalar və gücləndirici öyrənmə yanaşmaları arasında bölünür, bəziləri isə sonuncunun yaxın gələcəkdə hər şeyi əhatə edən alət olacağını gözləyir” dedi Cancio. “Biz göstəririk ki, məhdudiyyətlərə əsaslanan optimallaşdırma hələ də icraçı sistemlər üçün yer tutur və lazım olduqda hər birinin faydalarından istifadə etməyə ümid edirik.”
Bu tədqiqatçılar qrupu tərəfindən hazırlanmış yeni sistem tezliklə digər robotistləri də oxşar avtomatlaşdırılmış stolüstü tennis platformalarını inkişaf etdirməyə ruhlandıra bilər. Bundan əlavə, Nguyen, Cancio və Kim hazırladıqları aparat və idarəetmə alqoritmini digər dinamik manipulyasiya tapşırıqlarına tətbiq etməyə ümid edirlər.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=2520359048&adf=2636419947&pi=t.ma~as.2793866484&w=750&abgtt=6&fwrn=4&fwrnh=0&lmt=1748863035&rafmt=1&armr=3&format=750×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-05-robotic-table-tennis-ball-trajectory.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTM3LjAuNzE1MS41NSIsbnVsbCwwLG51bGwsIjY0IixbWyJHb29nbGUgQ2hyb21lIiwiMTM3LjAuNzE1MS41NSJdLFsiQ2hyb21pdW0iLCIxMzcuMC43MTUxLjU1Il0sWyJOb3QvQSlCcmFuZCIsIjI0LjAuMC4wIl1dLDBd&dt=1748863000782&bpp=1&bdt=390&idt=837&shv=r20250528&mjsv=m202505270101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Dfdc40d724f2dca57%3AT%3D1735367325%3ART%3D1748863001%3AS%3DALNI_MYStQ6fUQQQLyo5Z7z1h-XhXcWBtA&gpic=UID%3D00000f80eacffadc%3AT%3D1735367325%3ART%3D1748863001%3AS%3DALNI_MYaOugky0UawScoidzfbXof3-N-iw&eo_id_str=ID%3De43bb863646b60b8%3AT%3D1735367325%3ART%3D1748863001%3AS%3DAA-AfjbQoPwZqH28q9IwcCLRSzzg&prev_fmts=0x0%2C1905x945%2C750x280&nras=2&correlator=7344984373672&frm=20&pv=1&rplot=4&u_tz=240&u_his=2&u_h=1080&u_w=1920&u_ah=1032&u_aw=1920&u_cd=24&u_sd=1&dmc=8&adx=448&ady=4770&biw=1905&bih=945&scr_x=0&scr_y=1042&eid=31092756%2C95332924%2C95353387%2C95360391%2C95344789%2C95361617%2C95362173%2C95360684%2C95360294%2C95340252%2C95340254&oid=2&psts=AOrYGsn_hZcTnyYlH1u-2Xtn6ToYNEe-biiePr3QDpKsB8lKZJQ8r0ci4LQOFKkNTSxBpE7IlnS2_nz2gCa16XQ&pvsid=8495463377265105&tmod=2063993230&uas=3&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1920%2C0%2C1920%2C1032%2C1920%2C945&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=3&uci=a!3&btvi=2&fsb=1&dtd=34570
“Sentyabr ayında sənədi təqdim etdikdən sonra sistemin imkanlarını təkmilləşdirmək üçün çox şey etdik” dedi Nguyen. “Yəni, biz indi masanın müəyyən yerlərini hədəfə ala bilirik və bütün trayektoriyanı və topla avar arasında təması planlaşdırırıq.”
Gələcək tədqiqatlarının bir hissəsi olaraq, tədqiqatçılar stolüstü tennis robot platformasının imkanlarını daha da inkişaf etdirməyi planlaşdırırlar. Məsələn, MİT-in insanabənzər qolunun iş sahəsini portaldan (yəni, qolu dəstəkləyən bir quruluşdan) istifadə edərək genişləndirməklə, onlar ona insan istifadəçilərinə qarşı bütün stolüstü tennis oyunlarını oynamağa icazə verə bilərlər.
“Biz bir portaldan istifadə edərək iş sahəsini genişləndirərək və topdan çıxış sürətlərimizi əhəmiyyətli dərəcədə artıraraq sistemimizin performansını artırmağı hədəfləyirik” dedi Cancio.
“Biz həmçinin insanlar və digər robot sistemləri ilə daha yaxşı müqayisə etmək üçün standart stolüstü tennis toplarını izləməyə doğru hərəkət etmək istərdik .”
Ətraflı məlumat: David Nguyen və digərləri, Model Proqnozlaşdırıcı İdarəetmə ilə Yüngül Avadanlıqdan istifadə edərək Yüksək Sürətli Robot Stolüstü Tennis Swinging, arXiv (2025). DOI: 10.48550/arxiv.2505.01617
Jurnal məlumatı: arXiv
© 2025 Science X Network

