





Robotik dilin qavranılması: avtomatlaşdırma üçün açıq dünyanı açmaq

3D xüsusiyyət sahələri yaratmaq üçün 2D təsvirləri təməl modellərlə qarışdırmaqla, yeni MIT metodu robotlara açıq uçlu dil göstərişləri ilə yaxınlıqdakı obyektləri anlamağa və manipulyasiya etməyə kömək edir.
Təsəvvür edin ki, xaricdə bir dostunuzu ziyarət edirsiniz və onun soyuducunun içinə baxırsınız ki, nə gözəl səhər yeməyi hazırlayacaqsınız. Elementlərin bir çoxu əvvəlcə sizə yad görünür, hər biri naməlum qablaşdırma və qablara yığılmışdır. Bu vizual fərqlərə baxmayaraq, hər birinin nə üçün istifadə edildiyini anlamağa başlayırsınız və lazım olduqda onları götürürsünüz.
İnsanların tanımadığı obyektləri idarə etmək qabiliyyətindən ilhamlanaraq, MİT-in Kompüter Elmləri və Süni İntellekt Laboratoriyasından ( CSAIL ) bir qrup robotların müəyyən etməsinə kömək etmək üçün 2D təsvirləri təməl model xüsusiyyətləri ilə 3D səhnələrdə birləşdirən Robotik Manipulyasiya üçün Xüsusiyyət Sahələri ( F3RM ) dizayn etdi. və yaxınlıqdakı əşyaları tutun. F3RM insanlardan gələn açıq uclu dil göstərişlərini şərh edə bilər və bu metodu anbarlar və ev təsərrüfatları kimi minlərlə obyektin olduğu real dünya mühitlərində faydalı edir.
Robotik Uyğunlaşma və Tapşırıqların Ümumiləşdirilməsi
F3RM robotlara təbii dildən istifadə edərək açıq mətn göstərişlərini şərh etmək imkanı təklif edir, maşınlara obyektləri manipulyasiya etməyə kömək edir. Nəticədə, maşınlar insanlardan daha az spesifik sorğuları başa düşə və hələ də istənilən tapşırığı yerinə yetirə bilər. Məsələn, istifadəçi robotdan “hündür fincan götürməyi” xahiş edərsə, robot bu təsvirə ən uyğun olan əşyanı tapıb tuta bilər.
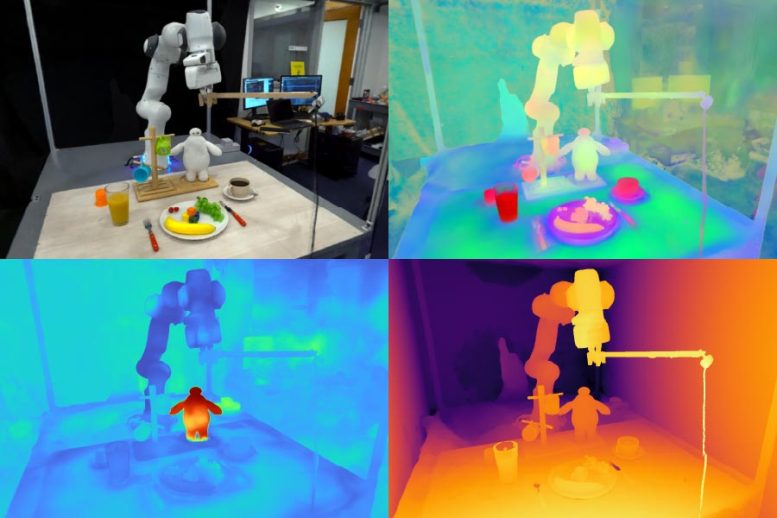
Robotik Manipulyasiya üçün Xüsusiyyət Sahələri (F3RM) robotlara təbii dildən istifadə edərək açıq mətn göstərişlərini şərh etməyə imkan verir, maşınlara tanış olmayan obyektləri manipulyasiya etməyə kömək edir. Sistemin 3D xüsusiyyət sahələri anbarlar kimi minlərlə obyektin olduğu mühitlərdə faydalı ola bilər. Kredit: Tədqiqatçıların izni ilə

