Robotlar da heyvanlar kimi zədələrdən sonra uyğunlaşa bilirlər
Balıq üzgəcləri və həşərat qanadları, sahiblərini su və ya havada səmərəli şəkildə hərəkət etdirə bilən heyrətamiz təbii mühəndislik parçalarıdır. Üzmək və ya uçmaq üçün maşınlar yaradan insanlar çoxdan heyvanlara model kimi baxıb, qanadlı təyyarələr və üzgəc formalı sükanlı qayıqlar dizayn ediblər. Son onilliklər ərzində Caltech və başqa yerlərdə tədqiqatçılar digər təbii hərəkət formalarının mexaniki mühəndisliyə məlumat verə biləcəyini görmək üçün bioinspired mühəndisliyi araşdırdılar.
Royal Society Interface jurnalının 3 iyul tarixli sayında ” Robotik sürətləndiricilərə ziyan vurmaq üçün bio-ilhamlı kompensasiya strategiyaları ” dərc edilib .
Bir çox heyvan hərəkət vasitəsi kimi çırpmaqdan istifadə edir və flapperlərlə təchiz olunmuş robotlar da özlərini səmərəli şəkildə hərəkət etdirə bilirlər. Lakin heyvanlar aləminin qanadlarının – bu halda balıqların və həşəratların – başqa bir hiyləsi var. Zədələnmiş qanadları və ya üzgəcləri olsa belə, bu heyvanlar kompensasiya etmək üçün hərəkətlərinin mexanikasını uyğunlaşdıra bilirlər. Bəzi balıq növləri üzgəclərinin yüzdə 76-sı zədələnmiş halda yaşaya bilir və hələ də üzməyi bacarır.
Robotik bir çırpıcı eyni uğura nail ola bilərmi? Bu, Aeronavtika və Tibb Mühəndisliyi üzrə Hans V. Liepmanın professoru, Avtonom Sistemlər və Mərkəzin direktoru və Booth-Kresa Rəhbərlik sədri Mori Qəribin (Ph.D. ’83) laboratoriyasında araşdırmaya ilham verən sualdır. Technologies (CAST) və Caltech-də Məzun Aerokosmik Laboratoriyalarının direktoru.
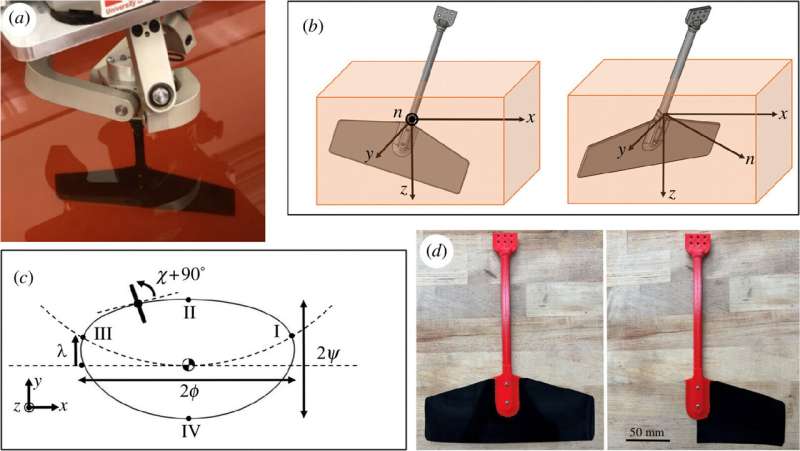
Gharib, aerokosmik aspirant Meredith Hooper və maşınqayırma və mülki mühəndislik üzrə doktorluqdan sonrakı alim tədqiqat işçisi Isabel Scherl ilə birlikdə siqnalına görə sudan daha dəqiq ölçməyə imkan verən bir neft çəni içərisində çırpınan robotun hərəkətlərini təhlil etdilər. -səs-küy nisbəti. Daha sonra robotun qanadının bir hissəsini amputasiya etdilər.
https://googleads.g.doubleclick.net/pagead/ads?client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=1873531024&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1722497828&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2024-07-robots-animals-injuries.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTUuMC4wIiwieDg2IiwiIiwiMTI3LjAuNjUzMy43NCIsbnVsbCwwLG51bGwsIjY0IixbWyJOb3QpQTtCcmFuZCIsIjk5LjAuMC4wIl0sWyJHb29nbGUgQ2hyb21lIiwiMTI3LjAuNjUzMy43NCJdLFsiQ2hyb21pdW0iLCIxMjcuMC42NTMzLjc0Il1dLDBd&dt=1722497828344&bpp=2&bdt=288&idt=224&shv=r20240729&mjsv=m202407250101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Db9da3e02405744d8%3AT%3D1721367090%3ART%3D1722497258%3AS%3DALNI_MbCxflFG1tK4Eg0JnLd1ADPoQRHCw&eo_id_str=ID%3D00ebd51b515acd52%3AT%3D1721367090%3ART%3D1722497258%3AS%3DAA-AfjajUyEPj_hS0T6XCNoUbt04&prev_fmts=0x0&nras=1&correlator=6094195546891&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=864&u_w=1536&u_ah=816&u_aw=1536&u_cd=24&u_sd=1.25&dmc=8&adx=395&ady=2024&biw=1519&bih=695&scr_x=0&scr_y=0&eid=44759875%2C44759926%2C44759842%2C31085664%2C95334529%2C95334828%2C95337027%2C95337870%2C31084187%2C95339223%2C95336267%2C31078663%2C31078665%2C31078668%2C31078670&oid=2&pvsid=3518512016548653&tmod=1517655612&uas=0&nvt=3&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1536%2C0%2C1536%2C816%2C1536%2C695&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=0&psd=W251bGwsbnVsbCwibGFiZWxfb25seV8xIiwxXQ..&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=232
Hərəkətə uyğunlaşma üçün maşın öyrənməsi
Müdaxilə olmasaydı, robot hələ də üzmək qabiliyyətini itirərək tankın içində boş yerə çırpılacaqdı. Lakin tədqiqatçılar bioinspired hərəkətə əlavə olaraq robota bioinspired uyğunlaşma da verdilər. Zədədən sonra balıqlar və həşəratlar yeni yollarla irəliləməyə çalışır, onları tam fəaliyyətə qaytara biləcək vuruş mexanikasını tapana qədər sınaqdan keçirirlər.
Bunu təqlid edərək, robot müxtəlif vuruş mexanikasının təkrar sınaqlarını yerinə yetirmək üçün proqramlaşdırıldı və sonra maşın öyrənmə yolu ilə qiymətləndirildi. Nəhayət, robot, yaralı balıq və ya böcək kimi, hətta 50 faizi çıxarıldıqda belə, zədələnmiş qanadıyla uğurlu alternativ hərəkət formasına nail oldu.
Huper izah edir: “Robot 10 müxtəlif üsulla üzməyə çalışır”. “Neft çənində üzərkən qüvvələr ölçülür ki, biz həm güc istehsalını, həm də onun səmərəliliyini müqayisə edə bilək. Maşın öyrənmə alqoritmi bizim istədiyimiz qüvvəni nə qədər yaxşı istehsal etdiklərinə əsaslanaraq ən yaxşı namizəd trayektoriyalarını seçir. Sonra alqoritm ortaya çıxır. əvvəlki dəstdən ilhamlanan başqa 10 trayektoriya dəsti ilə.
“Bu öyrənmə prosesi təkrarlanır – qiymətləndirmə, dəyişdirmə və yaratma – ən yaxşı namizədlər müəyyən bir qüvvə istehsalı üçün ən səmərəli üzgüçülük hərəkətini öyrənənə qədər az və ya çox dərəcədə eyni olur.”
. DOI: 10.1098/rsif.2024.0141")
Təcrübədə sürüşmə adaptasiyası
Avtonom bir robot yalnız bir növ zədə və ya nasazlıq səbəbindən müstəqil olana qədər avtonomdur. Robot mexanizmlərə maşın öyrənməsi vasitəsilə dəyişdirilmiş imkanlara uyğunlaşmaq imkanı verməklə, onların muxtariyyətlərinin əhatə dairəsi artır.
Huperin dediyi kimi, “Okeanlarımızın necə işlədiyi – dənizin dərinliklərində mövcud olanlar, insan fəaliyyətinin okean dinamikasını necə pozduğu barədə mühüm məlumat verən avtonom sualtı nəqliyyat vasitələrinin (AUV) qurulması və yerləşdirilməsi çox bahadır. Əgər AUV-nin hərəkət sistemi uğursuz olarsa. Bu uyğunlaşma vasitəsi olmadan əlçatmaz bir ərazidə, o, əslində okean zibilinə çevrilir.
” Maşın öyrənməsi vasitəsilə uyğunlaşma həmçinin zəlzələdən sonra tələyə düşmüş şəxslərin axtarışı kimi fövqəladə vəziyyətə reaksiya ssenariləri zamanı mürəkkəb ərazilərdə kiçik boşluqları idarə edə bilən mikro hava nəqliyyat vasitələrinin (MAV) funksiyasını yaxşılaşdıra bilər. Bu tip ərazi onu daha çox edir. Çox güman ki, axtarış zamanı MAV zədələnəcək, bizim tapıntımız MAV-ları zərərin ümumi ola biləcəyi çətin mühitlərdə yerləşdirmə üçün daha möhkəm edə bilər”.
Həm eksperimental robot, həm də canlı heyvanlar zədələrə uyğunlaşmaq üçün vuruş mexanikasını dəyişdirə bilsələr də, eyni dəyişiklikləri etmirlər. Teorik olaraq, bütün hallarda qanadlar (və ya qanadlar və ya qanadlar) zədələndikdən sonra optimal hərəkətə nail olmaq üçün həm amplituda, həm də tezliyi dəyişməlidir. Lakin üzgəcləri zədələnmiş balıqlar üzərində aparılan əksər tədqiqatlar göstərir ki, robot hər ikisini dəyişdirərkən balıq amplitudasını artırır, lakin kompensasiya etmək üçün vuruşlarının tezliyini mütləq deyil .
“Bu, çox güman ki, təkamül təzyiqlərinin robotların istifadəsinə aid olmayan balıq və böcəklərə təsiri ilə bağlıdır ” deyə Huoper izah edir. “Çılpaq robotların zədələrə ən yaxşı uyğunlaşması təbiəti təqlid etmir.”
Daha çox məlumat: ML Hooper və digərləri, Robot sürətləndiricilərinə ziyan vurmaq üçün bio-ruhlandırmış kompensasiya strategiyaları, Royal Society Interface jurnalı (2024). DOI: 10.1098/rsif.2024.0141
Jurnal məlumatı: Royal Society Interface jurnalı