














Robotlar üçün elektron burunların hazırkı vəziyyətinin xoşagəlməz bir görüntüsü
Paul Arnold tərəfindən , Phys.org
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
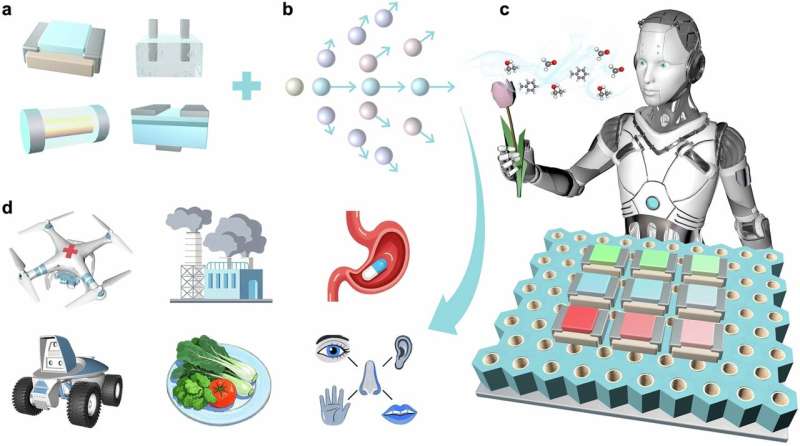
Robototexnikada e-burun tətbiqlərinin sxematik təsviri. Müəllif: npj Robotics (2026). DOI: 10.1038/s44182-025-00071-y
Elektron burunların (e-burunlar) təkmilləşdirilməsi sayəsində robotlar qoxuları daha yaxşı hiss edirlər. npj Robotics jurnalında dərc olunan robot qoxularının vəziyyətinə dair hərtərəfli araşdırmada texnologiyadakı son irəliləyişlər araşdırılıb. Bu araşdırma, bu rəqəmsal burunların qoxunun mənbəyini müəyyənləşdirməkdə daha həssas və daha bacarıqlı hala gəldiyini vurğulayır. Bu, axtarış və xilasetmə missiyalarından tutmuş təhlükəli qaz sızmalarının aşkarlanmasına qədər bir sıra sahələrdə irəliləyişlərə gətirib çıxarır.
Qoxunun dörd yolu
Tədqiqatçılar robotun burun dəlikləri kimi fəaliyyət göstərən dörd əsas elektron burun növünü nəzərdən keçiriblər. Bunlar qazları aşkar etmək üçün kiçik, qızdırılan lövhədən istifadə edən metal oksid sensorları , müəyyən molekulları aşkar etmək üçün kimyəvi reaksiyalara əsaslanan elektrokimyəvi sensorlar və qazları aşkar etmək üçün işıqdan istifadə edən optik sensorlardır. Onlar həmçinin çip üzərində qurulmuş və müxtəlif qaz molekulları onların üzərinə düşdükdə elektrik keçiriciliyini dəyişdirən sahə effektli tranzistorlara da baxıblar.
Hubble yeni tip obyektlərin ilk nümunəsi olan Cloud-9-u araşdırırPlay Video
Komanda yüzlərlə tədqiqat sənədini və real həyat təcrübələrini təhlil edərək bu fərqli e-burunların laboratoriya xaricində necə işlədiyini müqayisə etdi. Onlar hər növün öz güclü tərəfləri olsa da, hələlik mükəmməl e-burun olmadığını aşkar etdilər. Məsələn, metal oksid sensorları zəif siqnalları aşkar etməkdə əladır, lakin rütubətli mühit yanlış göstəricilərə səbəb ola bilər. Elektrokimyəvi sensorlar müəyyən bir qazı çox yaxşı müəyyən edə bilər, lakin içərisindəki kimyəvi maddələr quruduğu üçün daha qısa ömrü var.
Ən qabaqcıl e-noseslər birdən çox sensoru tək bir massivə inteqrasiya etməklə və qaz mənbəyinin lokalizasiyası (GSL) alqoritmlərindən istifadə etməklə bu məhdudiyyətləri aradan qaldırır. Bu riyazi modellər qoxunun haradan gəldiyini dəqiq müəyyən etmək üçün küləyin sürətini və qoxu konsentrasiyasını real vaxt rejimində emal edir. Bu o deməkdir ki, robot hava hərəkət edərkən belə fon qoxularını görməzdən gələ və qaz sızmasının mənbəyinə doğru hərəkət edə bilər.
Qarşılaşmalı çətinliklər
Lakin araşdırmaya görə, bu təsirli texnoloji irəliləyişlərə baxmayaraq, robot e-burunları hələ də uğursuzluğa düçar olur. Çox vaxt onlar burun korluğuna düşdüyü üçün zamanla dəqiqliklərini itirirlər . Yəni, onlar uzun müddətdir qoxuya məruz qaldıqları üçün qoxuya reaksiya verməyi dayandırırlar. Bu, burunlarımızın bir müddət otaqda qaldıqdan sonra qoxunu hiss etməməsinə bənzəyir. Digər bir problem küləkli şəraitdə və ya küləyin dəyişdiyi zaman qoxu izini itirməsidir.
Mövcud maneələrə baxmayaraq, tədqiqatçılar, xüsusən də daha yaxşı sensor materiallarını süni intellektlə birləşdirərkən texnologiyanın gələcəyinə nikbin yanaşırlar . Məqalələrində qeyd etdikləri kimi, “Bu çətinlikləri həll etməklə və fənlərarası innovasiyaları qəbul etməklə, e-burunlar ağıllı robototexnikanın vacib bir hissəsinə çevriləcək, sənaye sahələrində transformativ tətbiqləri açacaq və həyat keyfiyyətini əhəmiyyətli dərəcədə yaxşılaşdıracaq.”
Müəllifimiz Paul Arnold tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Weiqi Zhang və digərləri, Gələcək robot qoxusu üçün qabaqcıl elektron burunlar, npj Robotics (2026). DOI: 10.1038/s44182-025-00071-y
Jurnal məlumatı: npj Robotics
© 2026 Science X Network

