








Robotlardan istifadə edərək sərt olmayan peykləri sökmək üçün uyğunlaşdırılmış üsul
Bu gün Yer planetinin orbitində 8000-dən çox süni peyk var ki, onların da çoxu onilliklər əvvəl kosmosa buraxılıb. Bu peyklərin təmiri və düzgün işləməsinin təmin edilməsi həmişə asan olmur və çox vaxt diqqətlə planlaşdırılmış və məqsədyönlü müdaxilələr tələb olunur.
Ümumi peyk texniki xidmət əməliyyatı “detumbling” kimi tanınır. Bu proses kosmosda nəzarətsiz şəkildə fırlanmağa (yəni yıxılmağa) başlayan peyklərin oriyentasiyasının sabitləşdirilməsini və manipulyasiyasını tələb edir .
Nyu-Meksiko Universitetinin (UNM) tədqiqatçıları bu yaxınlarda naməlum hərəkət dinamikası ilə sərt olmayan peykləri sıradan çıxarmaq üçün yeni adaptiv üsul təqdim ediblər. Onların təklif etdiyi yanaşma arXiv preprint serverində dərc edilmiş məqalədə təsvir edilmişdir və dekabrın 16-19-da İtaliyanın Milan şəhərində keçirilən IEEE Qərar və Nəzarət Konfransında ( CDC 2024 ) təqdim olunacaqdır .
“Bizim məqaləmiz hazırkı kosmik tədqiqatlar üçün maliyyələşdirməmizə əsaslanır – SURI “, – Lonqsen Qao, məqalənin ilk müəllifi, hazırda üçüncü il Ph.D. Bu layihənin əsas tədqiqatçılarından biri kimi AgMan Laboratoriyasının tələbəsi Tech Xplore-a bildirib.
“UNM-də, nasaz məkanı düzəltməyə yönəlmiş mürəkkəb texniki xidmət və təmir işlərini yerinə yetirmək üçün yeni nəzarətçi dizaynlarını özündə birləşdirən çox-robot sistemlərimizdən (yəni, kosmik yedəklər, kosmosa xidmət göstərən çox qollu robot sistemləri və s.) istifadə etməyi hədəfləyirik. sistemlər, məsələn, peyklər, günəş panelləri , kosmik sistemlərin sərt və ya sərt olmayan hissələri və s.”
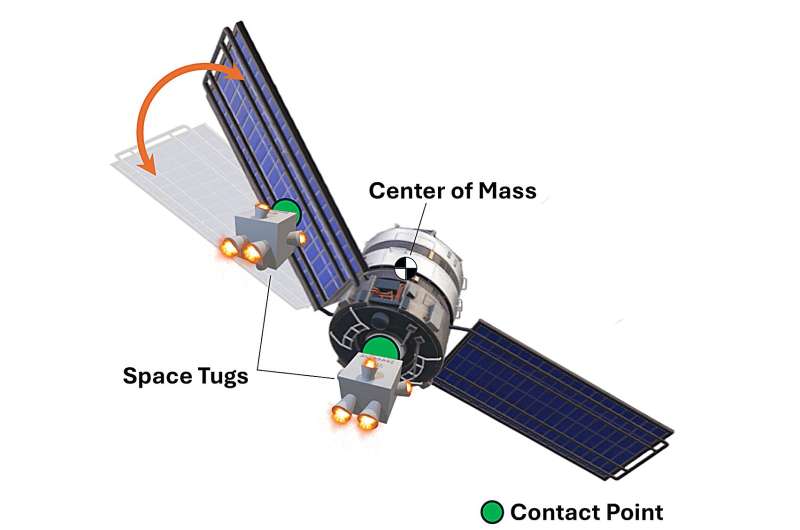
 və Link-2 (mavi hissə) üzərində açarları tətbiq etmək üçün peykin müxtəlif yerlərində birləşən iki kosmik yedək gəmisi. Biz hibrid menteşə sistemini realdan idxal edirik və rotorda sürtünmə, yay və damper xüsusiyyətlərini birləşdiririk. Kredit: Gao, Danielson & Fierro")
Gao və onun həmkarları tərəfindən aparılan son araşdırmanın əsas məqsədi sərt olmayan peykləri sökmək üçün effektiv metod hazırlamaq idi. Belə bir metodun mühüm nəticələri ola bilər, çünki yıxılma peyk nasazlığının əsas səbəbidir və əksər mövcud detumbling həlləri yalnız sərt peyklərə tətbiq olunur.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=1897700409&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1723059598&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2024-08-method-detumble-rigid-satellites-robots.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTAuMC4wIiwieDg2IiwiIiwiMTI3LjAuNjUzMy45OSIsbnVsbCwwLG51bGwsIjY0IixbWyJOb3QpQTtCcmFuZCIsIjk5LjAuMC4wIl0sWyJHb29nbGUgQ2hyb21lIiwiMTI3LjAuNjUzMy45OSJdLFsiQ2hyb21pdW0iLCIxMjcuMC42NTMzLjk5Il1dLDBd&dt=1723057907731&bpp=4&bdt=4176&idt=2031&shv=r20240801&mjsv=m202408060101&ptt=9&saldr=aa&abxe=1&cookie=ID%3D3b199fcd67477665%3AT%3D1722782760%3ART%3D1723057908%3AS%3DALNI_MYiVAjEyy4dUxgOksNR26c7Dw2QPA&eo_id_str=ID%3Dd042eab5cd0e9128%3AT%3D1722782760%3ART%3D1723057908%3AS%3DAA-AfjaezaeceO7ROnaS-eCO7629&prev_fmts=0x0%2C1423x739&nras=2&correlator=1108350023121&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=900&u_w=1440&u_ah=860&u_aw=1440&u_cd=24&u_sd=1&dmc=8&adx=347&ady=1929&biw=1423&bih=739&scr_x=0&scr_y=0&eid=44759875%2C44759926%2C44759837%2C31085722%2C44798934%2C95334527%2C95334830%2C95337869%2C95338226%2C31085927%2C31084186%2C95339225%2C95336267%2C31078663%2C31078665%2C31078668%2C31078670&oid=2&pvsid=3514123411284847&tmod=997116151&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1440%2C0%2C0%2C0%2C1440%2C739&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=0&td=1&tdf=0&psd=W251bGwsbnVsbCwibGFiZWxfb25seV80IiwxXQ..&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=M
“Qeyri-bərk peyklər üçün detumbling problemini nəzərdən keçirən başqa əvvəlki tədqiqatlar yoxdur” dedi Gao. “Demək olar ki, bütün sökülmə səyləri peykləri sərt cisimlər kimi nəzərdən keçirir, onların strukturunu sadələşdirir və sərtliklərindəki dəyişikliklər səbəbindən yarana biləcək potensial problemləri nəzərə almır.
“Tədqiqatımız bundan kənara çıxır, biri peykin əsasını tutan, digəri isə nasaz günəş panelini tutan iki kosmik yedəkləmə vasitəsi ilə bütün peyk modulunu iki keçidli zəncirə köçürmək üçün qeyri-bərk peykin detambling problemini həll edir. -peykin bilinməyən hərəkətini dayandıran sərt sistem.”
Bu tədqiqatçılar qrupu tərəfindən təqdim edilən detumbling metodu, xassələrindən asılı olmayaraq müxtəlif sərt olmayan obyektlərə tətbiq oluna bilməsi baxımından adaptivdir. Başqa sözlə, yanaşma peyki uğurla deformasiya etmək üçün peyk haqqında əvvəlcədən məlumat tələb etmir (məsələn, kütləsi, ətaləti, kütlə mərkəzi, forması, sərtliyi və s.).
“Ən əsası, bizim metodumuz çox agentli sistemin peykin kütlə mərkəzinə nisbətən tutma mövqeyini bilmədən qeyri-sərt peyki sökə bilməsini təmin edir ki, bu da SOTA adaptiv idarəetmə üsulları ilə müqayisədə bir irəliləyişdir” dedi Gao. .
Tədqiqatçıların təqdim etdiyi yanaşma peyki müxtəlif yerlərdə birləşdirən iki robot sistemin istifadəsini nəzərdə tutur. Bu sistemlər peyki sabitləşdirmək, onun hərəkətini dayandırmaq və bununla da onu düzgün işləməsinə qaytarmaq üçün lazım olan qüvvə və fırlanma momentini tətbiq edir.Oynamaq
00:0000:54SəssizParametrlərPIPTam ekrana daxil olun
“Bizim adaptiv detumbling metodumuz SOTA detumbling tədqiqatının ən çətin problemi ilə məşğul olur, yəni mövcud yanaşmaların əksəriyyəti detumbling prosesi zamanı peykin qeyri-rijid strukturuna məhəl qoymur” dedi Gao. “Biz bunu kosmosda işləyərkən peyklərdə baş verə biləcək ciddi və ümumi məsələ hesab edirik”.
Gao və onun həmkarları tərəfindən təqdim edilən yeni detambling yanaşması tezliklə təkmilləşdirilə və real təcrübələrdə, xüsusən də sıfır çəkisi mühitlərdə daha da sınaqdan keçirilə bilər. Qeyd edək ki, metod sərt olmayan peyklərin sökülməsi nəzərə alınmaqla tərtib edilsə də, o, sərt olmayan gövdə strukturları olan digər obyektlərə də tətbiq oluna bilər, beləliklə, digər texniki xidmət və təmir işlərini həll etmək üçün potensial olaraq istifadə edilə bilər.
“Kosmosa xidmət və təmirə yönəlmiş növbəti tədqiqatlarımızda biz təmir və xidmət tapşırıqları zamanı çevik manipulyasiya işlərini həyata keçirmək üçün robot sistemlərindən necə istifadə edəcəyimizi araşdırmağa davam edəcəyik” dedi Gao.
“Biz idarəetmə alqoritmimizdəki performansı artırmaq üçün öyrənməyə əsaslanan metodları (məsələn, neyron şəbəkələri, maşın öyrənməsi və dərin öyrənmə) idarəetmə sistemi dizaynımızla birləşdirməyi planlaşdırırıq . Biz həmçinin, tətbiq oluna bilən möhkəm adaptiv MPC alqoritm dizaynlarına diqqət yetiririk. metodumuzun effektivliyini və möhkəmliyini artıra bilən kosmik xidmət və təmir vəzifələri.”
Daha çox məlumat: Longsen Gao et al, Adaptive Robot Detumbling of a Non Rigid Satellite, arXiv (2024). DOI: 10.48550/arxiv.2407.17617
Jurnal məlumatı: arXiv
Download QRPrint QR

