


Sadələşdirilmiş robot tutucu hələ də mürəkkəb obyekt manipulyasiya tapşırıqlarının öhdəsindən gələ bilər
Son illərdə bütün dünyada robotistlər müxtəlif növ obyektləri götürə və manipulyasiya edə bilən müxtəlif robot tutucular hazırlayıblar. Həqiqi dünyadakı əl tapşırıqlarının, xüsusən də mürəkkəb obyekt manipulyasiya tapşırıqlarının həllində ən təsirli olan tutacaqlar çox vaxt insan əllərindən ilhamlananlardır.
Adətən yaxşı performanslarına baxmayaraq, bir çox insanabənzər robot əllər qabaqcıl və bəzən bahalı mexanizmlərə, eləcə də mürəkkəb proqramlaşdırma alətlərinə əsaslanır. Bu, onların geniş miqyasda yerləşdirilməsini məhdudlaşdıra bilər, çünki bu, onları enerjiyə qənaət edən və qənaətcil robotların hazırlanmasında praktiki imkansız edir.
Purdue Universiteti və Massaçusets Texnologiya İnstitutunun (MIT) tədqiqatçıları bu yaxınlarda daha sadə və eyni zamanda eyni dərəcədə təsirli bir robot tutucu hazırladılar. ArXiv preprint serverinə göndərilmiş bir kağızda təqdim olunan bu tutucunun insan əllərindən ilhamlanan tutucularla müqayisədə daha az sərbəstlik dərəcələrinə (DOF) malik olmasına baxmayaraq, mürəkkəb obyektlərin manipulyasiya tapşırıqlarını effektiv şəkildə həll etdiyi aşkar edilmişdir.
“Adi yüksək DOF çevik robot əlləri mürəkkəb əl ilə manipulyasiya tapşırıqlarını yerinə yetirə bilər, lakin onların mürəkkəb mexanizmlərinə görə proqramlaşdırma/nəzarət üçün qeyri-trivialdır”, – məqalənin həmmüəllifi Yu She, Tech Xplore-a bildirib.
“Əksinə olaraq, ənənəvi bir DOF paralel çənəli robot tutucular proqramlaşdırma/idarəetmə üçün asandır, lakin tutma tapşırıqları ilə məhdudlaşır və əl ilə manipulyasiyanı yerinə yetirməkdə çətinlik çəkirlər. Komandamız bu iki növ robot arasında körpü yaradan tutucu dizayn etməyi hədəfləyir. tutacaqlar.”
She və onun həmkarları tərəfindən hazırlanmış yeni tutucuda 5 DOF var. Sadə dizaynı proqramlaşdırma alətləri vasitəsilə idarə etməyi asanlaşdırsa da, tutucu hələ də inteqrasiya olunmuş görmə əsaslı toxunma sensoru tərəfindən qeydə alınan sensor məlumatlara əsaslanaraq, insan əllərindəki manipulyasiyaları yerinə yetirə bilir.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=1873531024&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1724922230&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2024-08-robotic-gripper-tackle-complex-tasks.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTUuMC4wIiwieDg2IiwiIiwiMTI3LjAuNjUzMy4xMjAiLG51bGwsMCxudWxsLCI2NCIsW1siTm90KUE7QnJhbmQiLCI5OS4wLjAuMCJdLFsiR29vZ2xlIENocm9tZSIsIjEyNy4wLjY1MzMuMTIwIl0sWyJDaHJvbWl1bSIsIjEyNy4wLjY1MzMuMTIwIl1dLDBd&dt=1724919644506&bpp=1&bdt=1877&idt=1031&shv=r20240827&mjsv=m202408220101&ptt=9&saldr=aa&abxe=1&cookie=ID%3Db9da3e02405744d8%3AT%3D1721367090%3ART%3D1724920427%3AS%3DALNI_MbCxflFG1tK4Eg0JnLd1ADPoQRHCw&eo_id_str=ID%3D00ebd51b515acd52%3AT%3D1721367090%3ART%3D1724920427%3AS%3DAA-AfjajUyEPj_hS0T6XCNoUbt04&prev_fmts=0x0%2C1519x695&nras=2&correlator=2502298953946&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=864&u_w=1536&u_ah=816&u_aw=1536&u_cd=24&u_sd=1.25&dmc=8&adx=395&ady=1838&biw=1519&bih=695&scr_x=0&scr_y=0&eid=44759876%2C44759927%2C44759842%2C31086449%2C95332586%2C95338229%2C31086515%2C31086141&oid=2&pvsid=2272627080035875&tmod=200008991&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=-1%2C-1%2C-1%2C-1%2C1536%2C0%2C1538%2C818%2C1536%2C695&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=0&psd=W251bGwsbnVsbCwibGFiZWxfb25seV8xIiwxXQ..&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=M
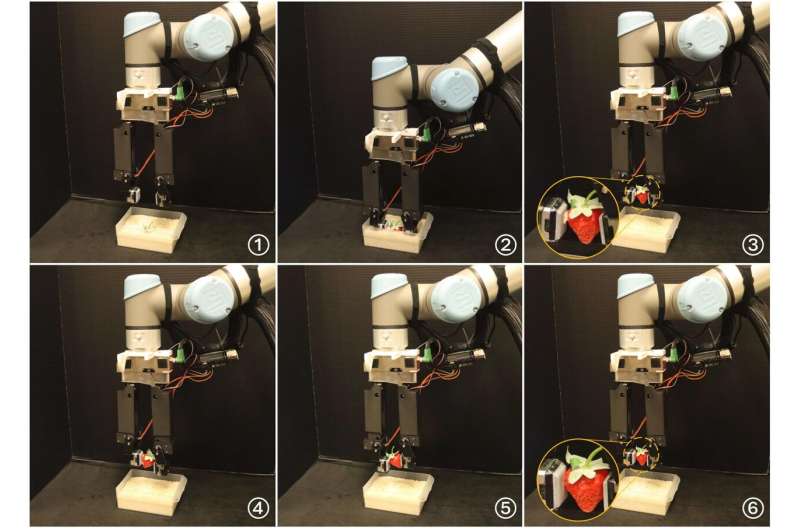
Yeni dizayn edilmiş tutucu əsasən tutucu bazaya bərkidilmiş iki barmaqdan ibarətdir. Qeyd edək ki, komanda həmçinin tutucunun sol barmağının yuxarı hissəsində kiçik görmə əsaslı toxunma sensoru quraşdırıb.

O izah etdi ki, “tutucu bazası tutucunun bağlanması və açılması üçün bir DOF təmin edir”. “Hər bir barmaq xətti ötürücü və fırlanan servo motorla təchiz olunub, tutucunun cəmi beş DOF-unu təmin edir. Tutucunun barmaqları 3D çapdan istifadə etməklə PLA materialından hazırlanır. Sol tərəfdə GelSight mini görmə əsaslı toxunma sensoru quraşdırılıb . Barmaq ucu, tutulan cismin həndəsəsi, oriyentasiyası və tutma qüvvəsi haqqında məlumat verir.”
She və onun həmkarı tərəfindən hazırlanmış tutucunun səciyyəvi xüsusiyyəti ondan ibarətdir ki, onun hərəkətləri asanlıqla idarə oluna bilsə də, 5 DOF-u birləşdirərək əl ilə manipulyasiya tapşırıqları zamanı yüksək səviyyəli çeviklik əldə edə bilir.
Tədqiqatçılar bir sıra ilkin real dünya təcrübələrində tutucunu qiymətləndirdilər və onun bir neçə DOF ilə ən sadə tutucuların əsas manipulyasiya bacarıqlarından kənara çıxdığını aşkar etdilər. Tutucu, singulyasiya və çömçə kimi tanınan iki növ obyekt manipulyasiyasını effektiv şəkildə tamamlaya bilər. Məsələn, o, insanların cismin səthi ilə barmaqları arasında ilişib qalmış qum hissəciklərini ovuşdurmaq hərəkətini təqlid edə bilər .
“Biz nümayiş etdiririk ki, insanabənzər robot əllə müqayisədə daha az sərbəstlik dərəcəsinə malik olan tutucu mürəkkəb əl ilə manipulyasiya işlərini uğurla yerinə yetirə bilər” dedi. “Mürəkkəbliyin bu azalması nəzarətçinin daha sadə dizaynına və həyata keçirilməsi və saxlanması daha asan olan daha möhkəm, qənaətcil, enerjiyə qənaət edən robot həllərinə gətirib çıxara bilər.”
Bu tədqiqat qrupu tərəfindən təqdim edilən robot tutucu tezliklə daha da inkişaf etdirilə və digər mürəkkəb obyekt manipulyasiya tapşırıqlarına tətbiq oluna bilər. Onun əsas dizaynı həm qənaətcil, həm də səmərəli olan obyektlərin manipulyasiyası üçün digər oxşar robot sistemlərinin inkişafına da ilham verə bilər.
“Biz indi digər robot tutucuların imkanlarından kənarda olan daha çətin manipulyasiya tapşırıqlarını yerinə yetirmək üçün hazırlanmış toxunma tutucudan istifadə etməyi planlaşdırırıq” dedi. “Bu vəzifələrə deformasiya olunan xətti obyektlərin manipulyasiyası daxildir, lakin bununla məhdudlaşmır.”
Daha çox məlumat: Yuhao Zhou və digərləri, 5 DOF Toxunma Tutucusu ilə Əldə Sinqulyasiya və Scooping Manipulyasiyası, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
Jurnal məlumatı: arXiv