Sürətlə sürə və maneələrin üzərindən tullana bilən velosiped robotu
İnqrid Fadelli , Phys.org tərəfindən
Sadie Harley tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
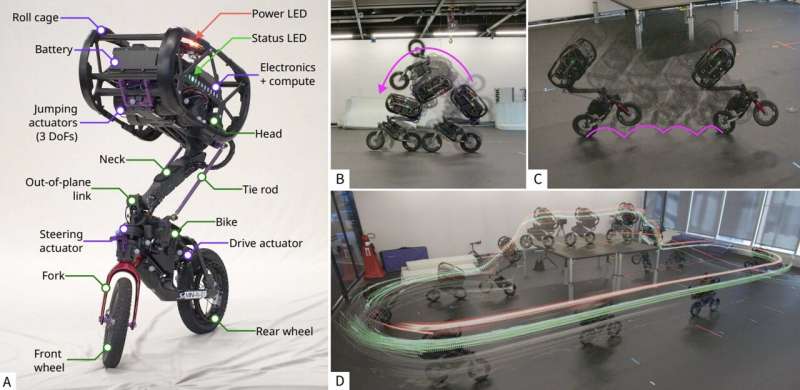
Ultramobillikli nəqliyyat vasitəsi (UMV) və onun atletik repertuarı. (A) Beş hərəkətli sərbəstlik dərəcəsinə malik velosiped əsaslı robot olan UMV-nin diaqramı [Bağlantılar (yaşıl) və alt komponentlər (bənövşəyi)]. Əsas yer hərəkətliliyi üçün sükan və arxa təkər ötürücülü aktuatorlara malikdir. Dizayn robotun kütləsinin çox hissəsini məkan bağlantısı vasitəsilə Velosipedlə birləşən Başda cəmləşdirir. Bu bağlantı Boyun və iki bağlama çubuğundan ibarətdir. Başdakı güclü aktuatorlar bağlantı vasitəsilə işləyir və robotun kütləsini ətrafa “atmasına” imkan verir və dinamik davranışları təmin edir. (B) yüksək addımlı bucaq impulsunu və gövdəni dartmaqla ətalət modulyasiyasını nümayiş etdirən ön çevirmənin, (C) robotun tək ayaqlı hopper kimi tarazlığını qoruduğu arxa təkər tullanmasının, (D) robotun sürətləndiyi, 1 metrlik platformaya tullandığı, onu keçdiyi və sabit şəkildə endiyi muxtar masa tullanma ardıcıllığının kompozit görüntüləri. Müəllif: Bokser və s.
Təcrübəli velosipedçilər velosiped sürərkən yerində tarazlıqdan tutmuş tək təkər üzərində sürməyə və ya maneələrin üzərindən tullanmağa qədər geniş manevrlər və akrobatikalar edə bilərlər. Bu çevik manevrləri iki təkərli robotlarda təkrarlamaq həm əyləncə, həm də robot idmanı, həm də kobud ərazidə mürəkkəb missiyaların yerinə yetirilməsi üçün yeni imkanlar aça bilər.
Robototexnika və Süni İntellekt İnstitutunun (RAI) tədqiqatçıları və onların əməkdaşları bu yaxınlarda yüksək sürətlə və diqqətəlayiq çevikliklə hərəkət edən, hündür maneələrin üzərindən tullanan və tək təkərdə belə tarazlığı qoruyan Ultra Mobility Vehicle (UMV) adlı yeni robot platforma yaratdılar.
arXiv pre-print serverində dərc olunmuş məqalədə təqdim olunan yeni iki təkərli robot, bacarıqlı insan velosipedçiləri tərəfindən yerinə yetirilən dinamik manevrləri uğurla yerinə yetirə bilir.
Məqalənin həmmüəlliflərindən ikisi olan Ben Bokser və Surya Singh Tech Xplore-a bildiriblər ki, “Robototexnikada əsas çətinlik əraziyə aqnostik yanaşaraq sürətlə hərəkət edən robotları tarazlaşdırmaqdır”.
“Təkərlər səmərəlilik təmin edir, ayaqlar isə pilləkənləri, səkiləri və kobud əraziləri idarə edir. Bu, robotunuzun nə qədər mürəkkəb, bahalı və enerji tələb edən olmasını istədiyinizlə robotun hərəkət edərkən naməlum şeyləri idarə edə bilməsini istədiyiniz arasında bir kompromis halına gəlir. Biz sınaq velosipedçilərinin və dağ velosipedçilərinin hər gün bu boşluğu doldurduğu həqiqətinə qayıdırdıq.”
Velosipedçilərdən ilhamlanan ultra hərəkətlilikli bir vasitə
Komanda, iki təkər üzərində velosiped sürən insan velosipedçilərinin ifa etdiyi akrobatikadan, məsələn, müxtəlif ərazilərdə sürətli sürmək, maneələri aşmaq və müvəqqəti olaraq tək təkər üzərində tarazlığı qorumaq qabiliyyətlərindən ilhamlanıb. Beləliklə, onlar oxşar hərəkətləri təkrarlaya bilən iki təkərli və çərçivəli bir robot hazırlamağa başladılar.
“Biz soruşduq: əgər eyni forma faktorunu götürüb ona kompakt oynaqlı mexanizm və müasir öyrənmə əsaslı idarəetmədən istifadə edərək kütləsini dinamik şəkildə yenidən yerləşdirmək imkanı versəydik necə olardı?” Bokser dedi.
“Əsas məqsədimiz atletik robot hərəkətinə nail olmaq üçün on iki dərəcə sərbəstliyə ehtiyac olmadığını göstərmək idi. Biz velosiped əsaslı robotun yalnız beş hərəkətə gətirilən sərbəstlik dərəcəsinə malik olduğunu, yüksək sürətlə hərəkət edə biləcəyini, dinamik şəkildə tarazlaşa biləcəyini və robotun özündən hündür maneələrə tullana biləcəyini nümayiş etdirmək istəyirdik.”
Tədqiqatçılar tərəfindən hazırlanmış UMV sistemi, əsasən, iki sırada yerləşən təkərli, sükan çərçivəli və arxa təkərli konfiqurasiyalı robot velosipeddir. Bu konfiqurasiya, mühərrikin yalnız arxa təkərə güc göndərərək robotu hərəkətə gətirməsini, ön təkərin isə yalnız sükan idarəetməsindən məsul olduğunu nəzərdə tutur.
“UMV, mexaniki sadəliyi mürəkkəb idarəetmə ilə birləşdirdikdə mümkün olanları araşdırmaq üçün bir sınaq meydançasıdır və demək olar ki, hər yerə səmərəli şəkildə gedə bilən bir robot ideyasını diqqət mərkəzinə gətirməyə kömək edir”, – deyə Sinq izah etdi.
“Onu fərqli edən şey, ağır bir ‘baş’ bölməsini ‘boyun’ və bağlama çubuqları vasitəsilə velosiped çərçivəsinə birləşdirən güclü məkan bağlantısıdır. Başı sürücü kimi düşünün: batareyalar, hesablama və aktuatorlar da daxil olmaqla, robotun kütləsinin çox hissəsini ehtiva edir. Bu aktuatorlar işə düşəndə, robotun kütləsini ətrafa ‘atmasına’, əyilməsinə, sonra tullanmasına və ya tarazlıq üçün yan tərəfə hərəkət etməsinə imkan verirlər.”
Real mühitlərdə həddindən artıq hərəkətlilik
Komandanın unikal dizaynı, nəticədə UMV robotuna ayaqlı robotlarla müqayisə edilə bilən çeviklik təmin edir və təkərli robotun sadəliyini qoruyub saxlayır. Xüsusilə, komandanın robotu, dörd ayaqlı və iki ayaqlı robotlar üçün xarakterik olan on iki və ya daha çox sərbəstlik dərəcəsi ilə müqayisədə, yalnız beş hərəkətə gətirilən sərbəstlik dərəcəsinə (DoF) malikdir.
Bokser bildirib ki, “Daha az birləşmə ümumiyyətlə daha az çəki, daha az istehsal mürəkkəbliyi və daha az qırıla bilən əşyalar deməkdir”.
“İstər sürücülük, istər balanslaşdırma, istər təkər sürmə, istər tullanmaq, istərsə də çevirmə olsun, UMV-nin bütün davranışları tamamilə simulyasiyada öyrədilmiş və əlavə tənzimləmə olmadan real robota ötürülən gücləndirmə öyrənmə siyasətləri ilə idarə olunur. Bu vacibdir, çünki bu davranışların çoxu, məsələn, robotun ön təkəri yan tərəfə sürətlə basaraq yerində fırlandığı “dönmə” kimi, açıq şəkildə proqramlaşdırılmamışdı. Onlar öyrənmə alqoritminin öz-özünə kəşf etdiyi həllər kimi ortaya çıxdı.”
Komandanın robotun hərəkətlərini planlaşdırmaq üçün istifadə etdiyi gücləndirmə təliminə əsaslanan yanaşma asanlıqla miqyaslandırıla və maneələri aşmaq və ya istədiyiniz yerlərə çatmaq üçün yeni strategiyalar hazırlamaq üçün istifadə edilə bilər. Bu o deməkdir ki, robot missiyanı uğurla başa çatdırmağa imkan verən ən yaxşı çevik hərəkət ardıcıllığını müstəqil şəkildə müəyyən edə bilər.
Məqalədə üç diqqətəlayiq töhfə bildirilir. Birincisi, robotun morfologiyasının özüdür. Bu, göstərir ki, insanların əksəriyyətinin sadə nəqliyyatla əlaqələndirdiyi velosiped əsaslı forma faktoru ən müasir ayaqlı robotlarla müqayisə edilə bilən atletik performans əldə edə bilər.
Bokser bildirib ki, “Robotun öz boyunun 130%-i olan 1 metr hündürlüyə tullanmaq və saniyədə 8 metr sürətə çatmaq UMV-ni daha mexaniki cəhətdən mürəkkəb platformalarla eyni performans diapazonuna qoyur”.
Komanda həmçinin sabit idarəetmədən akrobatik ön çevirmələrə qədər müxtəlif hərəkətlər yarada bilən vahid gücləndirmə təlim çərçivəsini təqdim etdi və bütün bunlar məşq zamanı mükafatları yalnız bir qədər uyğunlaşdırdı. Xüsusilə, robotun həm simulyasiyalarda, həm də real təcrübələrdə müxtəlif çevik manevrləri uğurla yerinə yetirdiyi aşkar edildi.
Bokser bildirib ki, “Möhkəmləndirmə təlim siyasətlərinin əlavə tənzimləmə olmadan simulyasiyadan reallığa keçməsi əhəmiyyətlidir, çünki bu o deməkdir ki, platformanı inkişaf etdirməyə davam etdikcə yanaşma yeni davranışlara da ümumiləşdirilə bilər”.
Sinq dizayn baxımından vurğuladı ki, “Dizaynımızda olmayanlar mövcud olanlar qədər vacibdir. UMV-nin reaksiya təkərləri, təpik dayaqları və s. yoxdur. Sabitlik tamamilə dinamik idarəetmənin məhsuludur. Bu, RAI-da bir çox işə rəhbərlik edən bir prinsipə uyğundur: mexaniki qabiliyyəti açmaq üçün hesablamadan istifadə edirik.”
Gələcək tətbiqlər və planlaşdırılan təkmilləşdirmələr
UMV platforması tezliklə daha da təkmilləşdirilə və daha geniş real dünya ssenarilərində sınaqdan keçirilə bilər.
Bokser bildirib ki, “Praktik tətbiqlər baxımından UMV-nin sürəti, kiçik məkan izi və maneələri dəf etmə qabiliyyətinin kombinasiyası şəhər çatdırılmasında, kobud ərazidə uzun məsafəli nəqliyyatda və ya daha geniş nəqliyyat vasitəsinin idarə edə bilmədiyi mühitlərdə yoxlamada rol oynayır”.
“Daha geniş şəkildə desək, UMV bir tədqiqat platformasıdır – o, bizə mexaniki dizayn, öyrənməyə əsaslanan idarəetmə və dinamik hərəkətin kəsişməsini fundamental səviyyədə anlamağa kömək edir. Bu dərslər robototexnikaya da aiddir.”
RAI-dakı həmkarlar hazırda robotlarının performansını daha da artırmaq və bacarıqlarını genişləndirmək məqsədi ilə yeni tədqiqatlar planlaşdırırlar. Nəticədə, onlar simulyasiya ilə real dünya təcrübələri arasındakı boşluğu tam şəkildə aradan qaldırmağa və UMV-nin gözlənilməz və dinamik mühitlərdə hərəkət etmək üçün ən yaxşı şəkildə təchiz olunmasını təmin etməyə ümid edirlər.
Sinqh əlavə edib ki, “Daha zəngin və müxtəlif təlim yaratmaq üçün kütləvi şəkildə paralel simulyasiya üsullarından istifadə edirik . Son məqsəd robotun qarşıdakı ərazini qavradığı və düzgün davranışı – sürmə, tullanmaq, hoppanmaq – real vaxt rejimində seçdiyi müxtəlif, strukturlaşdırılmamış mühitlərdə yüksək sürətli avtonom səyahətdir. Bundan əlavə, tezliklə paylaşacağımız daha çox şey olacaq. Yeni avadanlıqlar, sınaq üçün yeni mühitlər və daha çox şey üfüqdədir.”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Sadie Harley tərəfindən redaktə edilmiş və Robert Egan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmişdir — bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Benjamin Bokser və digərləri, Ultra Mobility Nəqliyyat Vasitəsinin Sistem Dizaynı: Sürücülük, Balanslaşdırma və Tullanma Velosiped Robotu, arXiv (2026). DOI: 10.48550/arxiv.2602.22118
Jurnal məlumatı: arXiv
Əsas anlayışlar
Bioilhamlanmış yumşaq robotlarMaşın öyrənmə metodologiyalarıMuxtar robot lokomotivi
© 2026 Science X Network