


Təbii dil idarəetməsi üçün robot əməliyyat sisteminin LLM-lərlə birləşdirilməsi
İnqrid Fadelli , Phys.org tərəfindən
Lisa Lock tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
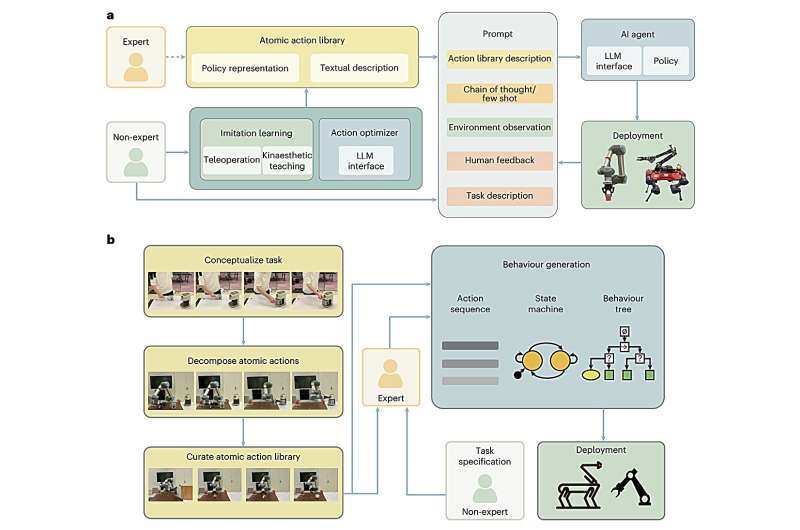
a) Komandanın təklif etdiyi ROS-LLM çərçivəsinə ümumi baxış, bir neçə komponentin inteqrasiyasını göstərir. İşarələnmiş xətlər çərçivənin yalnız bir dəfə təqdim edildiyi güman edilən hissələrini, məsələn, ilkin atom hərəkət kitabxanasını göstərir. b) Tipik robototexnika inkişaf iş axınına ümumi baxış. Mənbə: Nature Machine Intelligence (2026). DOI: 10.1038/s42256-026-01186-z
Son bir neçə onillikdə robototexnika tədqiqatçıları müxtəlif real dünya tapşırıqlarını müstəqil şəkildə yerinə yetirə bilən geniş çeşiddə getdikcə inkişaf edən robotlar hazırlamışlar. İctimai məkanlarda, evlərdə və ofis mühitlərində kimi real dünya mühitlərində uğurla yerləşdirilmək üçün bu robotlar insan istifadəçiləri tərəfindən verilən təlimatları anlaya və hərəkətlərini buna uyğunlaşdıra bilməlidirlər.
Londondakı Huawei Nuhun Gəmisi Laboratoriyası, Darmştadt Texniki Universiteti və Sürix ETH tədqiqatçıları bu yaxınlarda robotların istifadəçi təlimatlarını istənilən tapşırıqları həll etməyə və ya tapşırıqları yerinə yetirməyə kömək edəcək icra edilə bilən hərəkətlərə çevirmək qabiliyyətini artıra biləcək yeni bir çərçivə təqdim etdilər. Nature Machine Intelligence jurnalında dərc olunmuş bir məqalədə qeyd olunan bu çərçivə , insan dilini emal edə və yarada bilən böyük mətn məlumat dəstləri üzərində təlim keçmiş hesablama modellərini ən çox istifadə edilən robot idarəetmə proqramı olan robot əməliyyat sistemi (ROS) ilə birləşdirir.
Kristofer E. Mouer və həmkarları yazırdılar ki, “Təbii dil təlimatlarını etibarlı fiziki hərəkətlərə çevirə bilən muxtar robotlar süni intellektdə əsas problem olaraq qalır. Biz göstəririk ki, böyük bir dil model agentini ROS-a qoşmaq təcəssüm olunmuş zəka üçün çox yönlü bir çərçivə yaradır və tam tətbiqi sərbəst şəkildə mövcud olan açıq mənbə kodu kimi təqdim edirik.”
Robotlarda dil və hərəkəti əlaqələndirmək
Mower və həmkarları böyük dil modellərini ROS ilə inteqrasiya etməklə robotların cavabdehliyini və istifadəçi təlimatlarını dəqiq şəkildə yerinə yetirmə qabiliyyətlərini daha da yaxşılaşdırmaq istəyirdilər. ChatGPT-nin fəaliyyətini dəstəkləyən model kimi böyük dil modelləri mətnləri emal etməyi və istifadəçi suallarına və ya müxtəlif növ mətnlərə cavab yaratmağı öyrənən süni intellekt (Sİ) sistemləridir.
Digər tərəfdən, ROS, robototexnika tədqiqatçıları və robot tərtibatçıları tərəfindən geniş istifadə edilən açıq mənbəli proqram təminatı həlləri və digər alətlər dəstidir. Tədqiqatlarının bir hissəsi olaraq, tədqiqatçılar böyük dil modellərini və ROS-u effektiv şəkildə birləşdirən və yazılı təlimatların robot hərəkətlərinə çevrilməsinə imkan verən bir çərçivə yaratdılar.
Müəlliflər yazırdılar ki , “Agent böyük dil modellərinin nəticələrini avtomatik olaraq robot hərəkətlərinə çevirir, dəyişdirilə bilən icra rejimlərini (sətir içi kod və ya davranış ağacları) dəstəkləyir, təqlid yolu ilə yeni atom bacarıqlarını öyrənir və avtomatlaşdırılmış optimallaşdırma və insan və ya ətraf mühit rəylərindən əks olunma yolu ilə onları daim təkmilləşdirir”.
Əsasən, tədqiqatçılar tərəfindən təklif edilən çərçivə, istifadəçinin “yaşıl bloku götür və qara rəfə qoyun” kimi yazılı təlimatlarını emal etmək üçün böyük dil modellərinə əsaslanır. Model bu təlimatı daha kiçik addımlara bölür və robotun ROS proqram təminatı vasitəsilə yerinə yetirə biləcəyi hərəkətlər planı yaradır.
Yazılı təlimatların hərəkətlərə çevrilməsi iki fərqli şəkildə baş verə bilər. Birincisi, sətir içi kod vasitəsilədir, böyük dil modeli isə ROS vasitəsilə robotu birbaşa idarə etmək üçün istifadə edilə bilən kiçik icra edilə bilən kod parçaları yazır. İkincisi, davranış ağacı kimi tanınan strukturlaşdırılmış qərarlar dəsti vasitəsilədir və bu da hərəkətlərdən biri istənilən nəticəni əldə edə bilmədiyi təqdirdə alternativ variantlarla hərəkətləri aydın bir ardıcıllıqla təşkil edir.
Çərçivənin real dünya tapşırıqlarını sınaqdan keçirməsi
Tədqiqatçılar, müxtəlif real həyat tapşırıqlarını yerinə yetirmək tapşırığı verilən müxtəlif robotları əhatə edən bir sıra təcrübələrdə öz çərçivələrini sınaqdan keçirdilər. Bu testlərin nəticələri çox ümidverici idi, çünki əksər robotların təlimatları izləyə və tapşırıqları yerinə yetirə bildiyini aşkar etdilər.
Müəlliflər yazırdılar ki, “Geniş təcrübələr çərçivəni təsdiqləyir, uzunmüddətli tapşırıqlar, masaüstü yenidənqurmalar, dinamik tapşırıq optimallaşdırması və uzaqdan idarəetmə daxil olmaqla müxtəlif ssenarilərdə və təcəssümlərdə möhkəmliyi, miqyaslılığı və çox yönlülüyü nümayiş etdirir.” “Bundan əlavə, bu işdə təqdim olunan bütün nəticələr açıq mənbəli əvvəlcədən təlim keçmiş böyük dil modellərindən istifadə etməklə əldə edilmişdir.”
Gələcəkdə Mower və həmkarları tərəfindən təqdim edilən çərçivə daha da təkmilləşdirilə və daha geniş robotlar üzərində, getdikcə daha mürəkkəb tapşırıqlar üzərində və daha dinamik mühitlərdə sınaqdan keçirilə bilər. Bundan əlavə, bu, robot idarəetmə proqram təminatını böyük dil modelləri ilə uğurla əlaqələndirən digər oxşar həllərin inkişafına ilham verə bilər.