














Tekstil manipulyasiya tapşırıqları üzrə robototexnika alqoritmlərini öyrətmək üçün yeni yüksək keyfiyyətli verilənlər toplusu
Hal-hazırda insanlar tərəfindən yerinə yetirilən bir çox sənaye prosesləri və məişət işləri paltarlar, çarşaflar, dəsmallar, parçalar və digər parça əsaslı əşyalar da daxil olmaqla, tekstil məmulatlarının manipulyasiyasına səbəb olur. İndiyə qədər hazırlanmış robot sistemlərin əksəriyyəti, bu obyektlərin tutulduqda və idarə olunduqda necə deformasiyaya uğrayacağını proqnozlaşdırmaqla bağlı problemlər səbəbindən bütün növ tekstil məhsulları ilə etibarlı şəkildə manipulyasiya edilmir.
Institut de Robòtica i Informàtica Industrial (CSIC-UPC) və Universitat Politècnica de Catalunya-nın tədqiqatçıları paltarların deformasiyasını proqnozlaşdırmaq və onlarla manipulyasiya etmək üçün effektiv strategiyalar hazırlamaq üçün robototexnika alqoritmlərini öyrətmək üçün istifadə edilə bilən yeni məlumat dəstini tərtib etdilər.
Beynəlxalq Robotik Tədqiqat Jurnalında dərc olunan məqalədə təqdim olunan bu məlumat dəsti müxtəlif tekstil məhsullarına yerləşdirilən markerlərdən infraqırmızı işığı götürən və izləyən hərəkət tutma (MoCap) sistemindən istifadə etməklə toplanıb .
“Robotlar tərəfindən parçanın avtomatik manipulyasiyası cəmiyyətə və sənayeyə dərindən təsir edə biləcək potensial tətbiqdir” deyə məqalənin ilk müəllifi Franko Koltraro Tech Xplore-a bildirib.
“Hazırda evdə və faktiki olaraq paltarın aktual olduğu hər hansı bir iş yerində toxuculuq məhsulları insanlar tərəfindən əl ilə idarə olunur. Mağazalarda parça qatlama, otellərdə çarpayı tikmək, onlayn alış-verişdən gələn paltarların qaytarılması ilə məşğul olmağı düşünün: hər şey insanlar tərəfindən idarə olunur.
“Səbəb sadədir: parça ilə avtomatik manipulyasiya etmək çox çətindir, çünki parça çox sərbəst şəkildə deformasiyaya uğrayır, özü ilə toqquşur və çox mürəkkəb şəkildə hava ilə qarşılıqlı əlaqə yaradır. Beləliklə, avtomatik parça manipulyasiyasını təmin etmək üçün saysız-hesabsız riyazi və mühəndislik problemlərini həll etmək lazımdır.”
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=746485419&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1740587113&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-02-high-quality-dataset-robotics-algorithms.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTMzLjAuNjk0My4xMjgiLG51bGwsMCxudWxsLCI2NCIsW1siTm90KEE6QnJhbmQiLCI5OS4wLjAuMCJdLFsiR29vZ2xlIENocm9tZSIsIjEzMy4wLjY5NDMuMTI4Il0sWyJDaHJvbWl1bSIsIjEzMy4wLjY5NDMuMTI4Il1dLDBd&dt=1740587113106&bpp=1&bdt=1976&idt=-M&shv=r20250224&mjsv=m202502200101&ptt=9&saldr=aa&abxe=1&cookie=ID%3D594147a00c618f4c%3AT%3D1735548631%3ART%3D1740587112%3AS%3DALNI_MYbuCvlfveSCnpeUIQKyQ2DBT11fQ&gpic=UID%3D00000f84124e2904%3AT%3D1735548631%3ART%3D1740587112%3AS%3DALNI_Maf8g334ShSARz9IhljaNTJv-vUzg&eo_id_str=ID%3D639b28d7655b7aa4%3AT%3D1735548631%3ART%3D1740587112%3AS%3DAA-Afjakj_-HiAALGKSfOxRJbP3s&prev_fmts=0x0%2C1519x730&nras=2&correlator=7886659483420&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=864&u_w=1536&u_ah=816&u_aw=1536&u_cd=24&u_sd=1.25&dmc=8&adx=395&ady=1657&biw=1519&bih=730&scr_x=0&scr_y=0&eid=95344790%2C31090585%2C95348348%2C95350015&oid=2&pvsid=2717013352349064&tmod=615106203&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1536%2C0%2C1536%2C816%2C1536%2C730&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=300
Son illərdə bəzi tədqiqatçılar süni intellektdən (AI) istifadə edərək robot parça manipulyasiyası ilə bağlı çətinlikləri aradan qaldırmağa çalışırlar. Yaxşı işləmək üçün süni intellekt və maşın öyrənməsinə əsaslanan modellərin əksəriyyəti böyük həcmdə məlumat üzərində təlim keçməlidir.
Müxtəlif toxuculuqların deformasiyasını əks etdirən böyük miqdarda məlumatların toplanması çox bahalı və vaxt apara bilər. Buna görə də, indiyə qədər bir çox robotistlər bunun əvəzinə müxtəlif materiallardan hazırlanmış parçaları imitasiya etmək üçün nəzərdə tutulmuş parça simulyatorları adlanan sistemlərdən istifadə etdilər.Oyna
00:00
01:44SəssizParametrlərPIPTam ekrana daxil olun
“Bir çox fərqli parça simulyatorları var (əksəriyyəti video oyun və animasiya sənayesindən gəlir)” Coltraro dedi.
“Hətta mən belə bir şey hazırlamışam. Məsələ burasındadır ki, əksər parça simulyatorları robot texnikasında istifadə edilmək üçün deyil, filmlərdə və video oyunlarında istifadə olunmaq üçün nəzərdə tutulmuşdur; buna görə də onların əksəriyyəti çox real deyil. Realist olan bir neçə parça simulyatorlarının (məsələn, mənim, əgər belə deyə bilərəmsə) real geyimlərin davranışına uyğun olması üçün köklənməli və ya təxmin edilməli parametrləri var.”
Coltraro və onun həmkarları tərəfindən aparılan son araşdırmanın əsas məqsədi parça simulyatorları tərəfindən yaradılan məlumatları təkmilləşdirməyə kömək edə biləcək yeni yüksək keyfiyyətli məlumat toplusunu tərtib etmək idi. Bunun üçün onlar MoCap sistemindən istifadə edərək müxtəlif tekstil məmulatlarının hərəkətlərini göstərən 120 yazı toplayıblar.
“Bizim topladığımız qeydlər parça simulyatorlarının parametrlərini tənzimləməyə kömək edə bilər” dedi Koltraro. “Sonra bu köklənmiş parça simulyatorları ucuz qiymətə böyük həcmdə məlumat yaratmaq üçün istifadə oluna bilər ki, bu da öz növbəsində süni intellekt modellərini öyrətməyə imkan verir. Ümid edirik ki, gələcəkdə bu süni intellekt alqoritmləri robot parça ilə manipulyasiya problemini həll edə bilər”.
Tədqiqatçıların məlumat toplamaq üçün istifadə etdikləri MoCap sistemi infraqırmızı işığı əks etdirən kiçik və çox yüngül (yəni, çəkisi 0,013 qramdan az) markerlərə əsaslanır. Bu işıq markerləri hərəkətlərinə təsir etmədən zamanla deformasiyasını izləmək üçün müxtəlif ölçülü və müxtəlif materiallardan hazırlanmış parçaların üzərinə yerləşdirilib.
“Biz bu əks etdirən markerləri izləmək üçün çoxlu kameralardan istifadə etdik və buna görə də onların kosmosda harada olduğunu bilirik” dedi Coltraro.
“MoCap-dan digər yanaşmalara (yəni, Xbox Kinect kimi dərinlik kameraları) qarşı istifadənin üstünlüyü ondan ibarətdir ki, qeydlər çox hamardır (demək olar ki, heç bir səs-küy yoxdur) və kameralar səhnəni əhatə edə bildiyi üçün bir çox müxtəlif hərəkətləri qeyd edə bilər (biz parça öz-özünə tıxanmalarını minimuma endirə bilərik).”
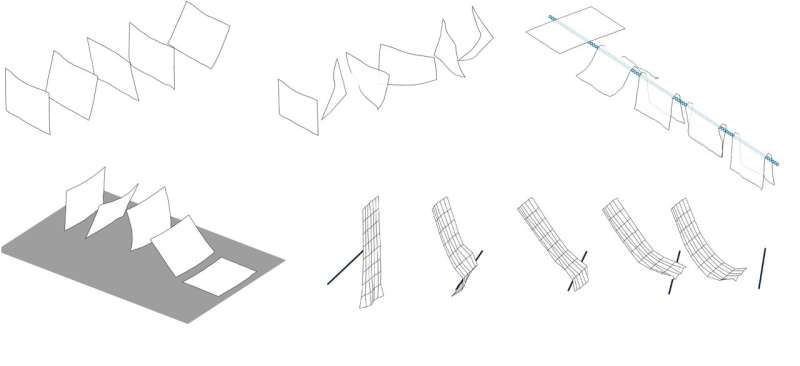
Coltraro və onların həmkarları iki ölçüdə və dörd müxtəlif materialdan, yəni pambıq, denim, yun və polyesterdən hazırlanmış paltarları qeydə alıblar. Bu parçalar fərqli şəkildə işləndikdə necə deformasiyaya uğradığını göstərmək üçün müxtəlif sürətlərdə qeydə alınıb.
 eyni anda ən azı iki kameraya görünsün. Sağda: diametri 3 mm və çəkisi 0,013 q olan denim nümunəsinə yapışdırılmış əks etdirici markerlər. Kredit: Franco Coltraro.")
MoCap məlumatları qeydə alındıqda, parçalar real dünya ssenarilərini əks etdirən xüsusi üsullarla manipulyasiya edildi. Məsələn, tədqiqatçılar onları silkələyib, büküb, sürtünən cisimlərə sürtüb, uzun sərt alətlə vurub, hətta bir-birinə vurublar.
“Bu araşdırmanın ən diqqətəlayiq və gözlənilməz nəticələrindən biri, eyni parça və eyni hərəkətlə belə parçanın hərəkətində nə qədər dəyişkənliyin olması idi” dedi Coltraro.
“Biz DIN A3 polyester nümunəsini götürdük və robot və parça ilə eyni hərəkəti dəfələrlə yerinə yetirdik. Hərəkət parçanın dinamik şəkildə masanın üzərinə yerləşdirilməsi idi. Siz hər dəfə bezin son vəziyyətinin eyni olacağını gözləyirdiniz, elə deyilmi? Yanlışdır.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=1041534309&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1740587137&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-02-high-quality-dataset-robotics-algorithms.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTMzLjAuNjk0My4xMjgiLG51bGwsMCxudWxsLCI2NCIsW1siTm90KEE6QnJhbmQiLCI5OS4wLjAuMCJdLFsiR29vZ2xlIENocm9tZSIsIjEzMy4wLjY5NDMuMTI4Il0sWyJDaHJvbWl1bSIsIjEzMy4wLjY5NDMuMTI4Il1dLDBd&dt=1740587112023&bpp=1&bdt=893&idt=236&shv=r20250224&mjsv=m202502200101&ptt=9&saldr=aa&abxe=1&cookie=ID%3D594147a00c618f4c%3AT%3D1735548631%3ART%3D1740587112%3AS%3DALNI_MYbuCvlfveSCnpeUIQKyQ2DBT11fQ&gpic=UID%3D00000f84124e2904%3AT%3D1735548631%3ART%3D1740587112%3AS%3DALNI_Maf8g334ShSARz9IhljaNTJv-vUzg&eo_id_str=ID%3D639b28d7655b7aa4%3AT%3D1735548631%3ART%3D1740587112%3AS%3DAA-Afjakj_-HiAALGKSfOxRJbP3s&prev_fmts=0x0%2C1519x730%2C540x135%2C1005x124&nras=3&correlator=7886659483420&frm=20&pv=1&rplot=4&u_tz=240&u_his=2&u_h=864&u_w=1536&u_ah=816&u_aw=1536&u_cd=24&u_sd=1.25&dmc=8&adx=395&ady=3978&biw=1519&bih=730&scr_x=0&scr_y=1098&eid=95344790%2C31090585%2C95348348%2C95350015&oid=2&psts=AOrYGsl9_ShWF8JeSoNtNc9iL0peWp2fPffgtk6atU6EdgFH7QnBiVv3IWQ6qSlyOw9ou_6Cx_MAI6qzqMWpTjBCJZVgCzdJQgNXWE_F0PFXssEbMdBgAA&pvsid=2717013352349064&tmod=615106203&uas=3&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1536%2C0%2C1536%2C816%2C1536%2C730&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=3&uci=a!3&btvi=3&fsb=1&dtd=25714
“Hətta bir robotla (o, eyni trayektoriyanı səhvsiz yerinə yetirdi), biz son vəziyyətdə variasiya tapdıq (çox böyük deyil, bəziləri). Məncə, bu, xaos nəzəriyyəsi ilə bağlıdır və parça manipulyasiyası üçün başqa bir problem ola bilər.”
Coltraro və onun həmkarları tərəfindən yaradılan yeni verilənlər bazası tezliklə parça simulyatorlarını tənzimləmək, onların istehsal etdiyi simulyasiyaların keyfiyyətini artırmaq üçün istifadə edilə bilər. Bu, real, lakin simulyasiya edilmiş parça deformasiyaları və hərəkətlərini ehtiva edən yeni verilənlər bazalarının yaradılmasına gətirib çıxara bilər ki, bu da öz növbəsində robotlaşdırılmış parça manipulyasiyası üçün AI modellərini öyrətmək üçün istifadə edilə bilər.
“Növbəti tədqiqatlarımda mən robotlarla parça manipulyasiya etmək üçün alqoritmlər hazırlamaq üçün öz uzanmayan parça simulyatorumdan istifadə etməyi planlaşdırıram” deyə Coltraro əlavə edib.
“Mən bu məqalədəki məlumatlardan simulyatorumu real paltarların davranışına uyğunlaşdırmaq üçün tənzimləmək və sonra manipulyasiya alqoritmlərini inkişaf etdirmək üçün istifadə edəcəyəm. Həll etdiyim açıq problemlər toxuculuqların aerodinamikasını modelləşdirmək və parçanın təqdim edə biləcəyi mümkün deformasiya hallarını və onlar arasında necə hərəkət edəcəyini riyazi olaraq öyrənməkdir.”
Daha çox məlumat: Franco Coltraro və başqaları, Parça deformasiyasını izləmək: Robotik parça manipulyasiyasını öyrənmək üçün sim-həqiqi boşluğu bağlamaq üçün yeni bir məlumat dəsti, Beynəlxalq Robotik Tədqiqat Jurnalı (2025). DOI: 10.1177/02783649251317617
Jurnal məlumatı: Beynəlxalq Robotik Tədqiqat Jurnalı
© 2025 Science X Network

