





Yeni çip robotlara məsafəni və sürəti eyni anda izləməklə 4D-də görməyə imkan verir
Paul Arnold tərəfindən , Phys.org
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
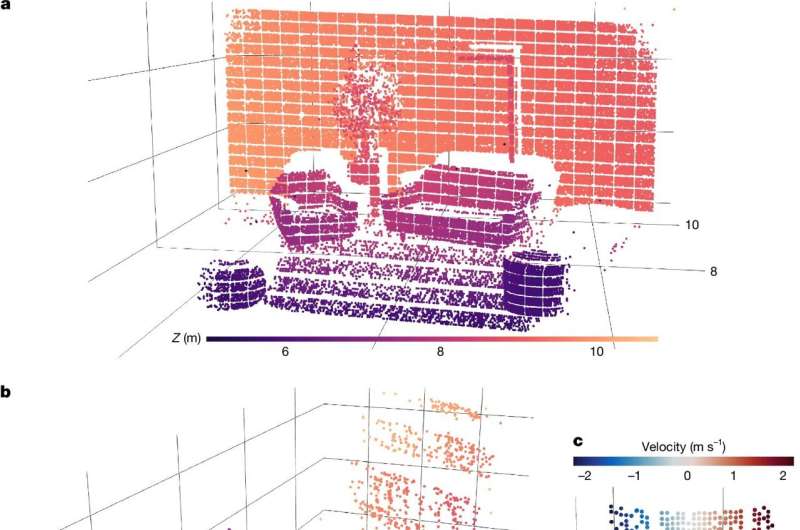
Nöqtə buludlarına nümunə. Müəllif: Nature (2026). DOI: 10.1038/s41586-026-10183-6
Robotlar və dronlar üçün mövcud görmə sistemləri güclü olsalar da, həmişə real dünyanın sürətli və gözlənilməz hərəkətinə uyğun gəlməyən 3D sensorlara əsaslanır. Bu sistemlər tez-tez sürəti dərhal ölçməkdə çətinlik çəkir və ya gündəlik istifadə üçün çox böyük və bahalıdır. İndi isə, Nature jurnalında dərc olunan bir məqalədə alimlər hərəkət edən obyektlərin sürətini eyni vaxtda izləyərkən ətraf mühitin 3D xəritələrini yaradan çipdə 4D görüntüləmə sensoru necə hazırladıqlarını bildirirlər.
Çip üzərindəki sensorlar
Tədqiqatçılar tək bir silikon çipə həkk olunmuş 61.952 stasionar pikseldən ibarət fiziki şəbəkə olan fokus müstəvisi massivi (FPA) qurdular. Hər biri səhnəyə lazer işığı yayan və əks olunan siqnalı aşkar edən kiçik bir sensordur.
Ətraf mühiti “görmək” üçün xarici mənbədən lazer işığı çipə daxil olur. Bu işıq, onu ardıcıl olaraq piksel qruplarına yönəldən optik açarlar şəbəkəsi vasitəsilə çip boyunca ötürülür. Daha sonra hər bir piksel, geri dönən siqnalı ölçmək üçün FMCW LiDAR adlı bir texnikadan istifadə edir və bu texnika sonradan məsafəni və sürəti təyin etmək üçün emal olunur. Bir çox LiDAR sistemində bir piksel dəsti işığı göndərir, digəri isə onu qəbul edir, lakin burada bütün piksellər həm göndərir, həm də qəbul edir və bu da sistemi daha kompakt edir.
Bundan əlavə, çip ənənəvi sensorların işləmə prinsipinə uyğun olaraq qısa işıq impulsları əvəzinə davamlı lazer şüasından istifadə edir . Bunun üstünlüyü sensorun işıq dalğalarının tezliyindəki kiçik dəyişiklikləri aşkar etməsinə imkan verməsidir. Bu, çipin eyni zamanda obyektin məsafəsini və sürətini hesablamasına imkan verir.
Məsafəni və sürəti eyni anda ölçmək
Komanda sensorlarını müxtəlif məsafələri və hərəkətləri necə idarə edə biləcəyini görmək üçün bir neçə mühitdə çip üzərində sınaqdan keçirdi. Səhnələri skan etdi və sonra onları minlərlə məlumat nöqtəsindən ibarət 3D rəqəmsal xəritələrə çevirdi. Sistem qapalı otaqları 6-11 metr məsafədə uğurla xəritələşdirdi.
Alimlər çipi 65 metr aralıda yerləşən binaya yönəldiblər və o, pəncərələr və balkonlar kimi detalları qeydə almaq üçün kifayət qədər güclü olub. Onlar həmçinin öz yeniliklərini fırlanan diskdə sınaqdan keçiriblər və o, anında sürətini ölçüb.
Müxbir müəllif Remus Nikolaesku yazırdı: “Bu, bütün əlaqəli elektronikanın çipə inteqrasiya olunmuş genişmiqyaslı əlaqəli FPA- nın ilk nümayişidir və geniş yayılma üçün lazım olan xərc strukturuna gətirib çıxarır”.
Komandanın hələ də çip üzərində görəcəyi işlər var, məsələn, qətnaməni artırmaq və diapazonunu genişləndirmək. Laboratoriyadan çıxdıqdan sonra, o, yalnız robotlara və dronlara kömək etməklə kifayətlənməyəcək. Texnologiya həmçinin telefonlarımızdakılar da daxil olmaqla rəqəmsal kameraları da təkmilləşdirə bilər.
Müəllifimiz Paul Arnold tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Francesca Fabiana Settembrini və başqaları, Geniş miqyaslı əlaqəli 4D görüntüləmə sensoru, Təbiət (2026). DOI: 10.1038/s41586-026-10183-6
Jurnal məlumatı: Təbiət
Əsas anlayışlar
Muxtar hava robotlarıAğıllı sensor metamateriallarıHesablama 3D görmə
© 2026 Science X Network