







Yeni öyrənməyə əsaslanan metod robotları obyektləri etibarlı şəkildə götürüb yerləşdirməyi öyrədir

Bu günə qədər hazırlanmış əksər robot sistemləri ya yüksək dəqiqliklə müəyyən bir tapşırığın öhdəsindən gələ bilər, ya da bir sıra sadə tapşırıqları aşağı dəqiqliklə yerinə yetirə bilər. Məsələn, bəzi sənaye robotları xüsusi istehsal tapşırıqlarını çox yaxşı yerinə yetirə bilər, lakin yeni vəzifələrə asanlıqla uyğunlaşa bilmirlər. Digər tərəfdən, müxtəlif obyektləri idarə etmək üçün nəzərdə tutulmuş çevik robotlar çox vaxt praktiki şəraitdə yerləşdirilməsi üçün lazım olan dəqiqliyə malik deyillər.
Dəqiqlik və ümumiləşdirmə arasındakı bu mübadilə bu günə qədər ümumi təyinatlı robotların və ya başqa sözlə, insan istifadəçilərinə bir çox müxtəlif vəzifələrdə yaxşı kömək edə bilən robotların geniş miqyasda yerləşdirilməsinə mane olub. Müxtəlif real dünya problemlərinin həlli üçün tələb olunan qabiliyyətlərdən biri obyektlərin dəqiq müəyyən yerlərdə yerləşdirilməsi, götürülməsi və yerləşdirilməsini nəzərdə tutan “dəqiq seç və yerləşdirmə” qabiliyyətidir.
Massaçusets Texnologiya İnstitutunun (MIT) tədqiqatçıları bu yaxınlarda robot sistemlərə müxtəlif obyektləri götürməyə və yerləşdirməyə imkan verən yeni öyrənmə əsaslı, vizual-taktil üsulu olan SimPLE (Simulation to Pick Localize and placeE) təqdim etdilər. “Science Robotics” də təqdim edilən bu üsul müxtəlif obyektlərin götürülməsini, yenidən tutulmasını və yerləşdirilməsini öyrənmək üçün simulyasiyadan istifadə edir və bu obyektlərin yalnız kompüter dəstəkli dizaynlarını tələb edir.
“Robotik manipulyasiya sahəsində çalışan bir neçə il ərzində biz sənaye tərəfdaşları ilə sıx əlaqədə olduq” dedi kağızın ilk müəllifləri Maria Bauza və Antonia Bronars Tech Xplore-a. “Məlum oldu ki, avtomatlaşdırmada mövcud problemlərdən biri obyektlərin dəqiq seçilməsi və yerləşdirilməsidir. Bu problem mürəkkəbdir, çünki o, robotdan obyektlərin strukturlaşdırılmamış düzülməsini mütəşəkkil bir quruluşa çevirməyi tələb edir və bu, sonrakı manipulyasiyanı asanlaşdıra bilər.”
https://www.youtube.com/embed/isLY0ddTWG4?color=whiteBeş obyektin robot manipulyasiyası. Kredit: Maria Bauza
Müxtəlif sənaye robotları artıq müxtəlif obyektləri götürmək, tutmaq və yerə qoymaq qabiliyyətinə malikdir. Bununla belə, bu yanaşmaların əksəriyyəti qutular, fincanlar və ya qablar kimi geniş istifadə olunan kiçik obyektlər toplusunda ümumiləşdirilir və dəqiqliyi vurğulamır.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=135&slotname=2793866484&adk=675901022&adf=1873531024&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&lmt=1721854568&rafmt=11&format=540×135&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2024-07-based-method-robots-reliably.html&wgl=1&uach=WyJXaW5kb3dzIiwiMTAuMC4wIiwieDg2IiwiIiwiMTI2LjAuNjQ3OC4xODMiLG51bGwsMCxudWxsLCI2NCIsW1siTm90L0EpQnJhbmQiLCI4LjAuMC4wIl0sWyJDaHJvbWl1bSIsIjEyNi4wLjY0NzguMTgzIl0sWyJHb29nbGUgQ2hyb21lIiwiMTI2LjAuNjQ3OC4xODMiXV0sMF0.&dt=1721854474361&bpp=1&bdt=1392&idt=273&shv=r20240722&mjsv=m202407180101&ptt=9&saldr=aa&abxe=1&cookie=ID%3D9ead181ef67abbaa%3AT%3D1721801884%3ART%3D1721854444%3AS%3DALNI_MYoq0akGsLUXhAUIhnaG6TQeS4STg&eo_id_str=ID%3Db268401c0e4aeef7%3AT%3D1721801884%3ART%3D1721854444%3AS%3DAA-AfjYSUg2K_FFfwOkLTloH9McJ&prev_fmts=0x0%2C1423x739&nras=2&correlator=7473573030607&frm=20&pv=1&ga_vid=1057348607.1721801883&ga_sid=1721854474&ga_hid=1221390582&ga_fc=1&rplot=4&u_tz=240&u_his=1&u_h=900&u_w=1440&u_ah=860&u_aw=1440&u_cd=24&u_sd=1&dmc=8&adx=347&ady=2171&biw=1423&bih=739&scr_x=0&scr_y=0&eid=44759876%2C44759927%2C44759837%2C95334529%2C95334829%2C95337870%2C95338260%2C95337093%2C31078663%2C31078665%2C31078668%2C31078670&oid=2&pvsid=3939135903526856&tmod=1504519370&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1440%2C0%2C0%2C0%2C1440%2C739&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=0&td=1&tdf=0&psd=W251bGwsbnVsbCwibGFiZWxfb25seV80IiwxXQ..&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=93670
Bauza, Bronars və onların həmkarları robotlara yalnız simulyasiya edilmiş məlumatlara əsaslanaraq istənilən obyekti dəqiq şəkildə götürüb yerləşdirməyə imkan yarada biləcək yeni metod hazırlamağa başladılar. Bu, real dünyada robotların müxtəlif obyektlərlə qarşılıqlı əlaqəsini öyrənən bir çox əvvəlki yanaşmalardan fərqlidir.
“SimPLE simulyasiyada hazırlanmış üç əsas komponentə əsaslanır” dedi Bauza və Bronars. “Birincisi, tapşırığı bilən qavrayış modulu sabit, müşahidə edilə bilən və yerləşdirilməsi üçün əlverişli olan obyekti seçir. Daha sonra, vizual-taktil qavrayış modulu obyekti yüksək dəqiqliklə lokallaşdırmaq üçün görmə və toxunuşu birləşdirir. Nəhayət, planlaşdırma modulu obyekti hesablayır. hədəf mövqeyinə aparan ən yaxşı yol, lazım gələrsə, obyektin digər qola təhvil verilməsi də daxil ola bilər.”
https://www.youtube.com/embed/ksKqqZ2ktzw?color=whiteSadə yanaşma və nəticələrə baxış. Video SimPLE-nin əsas üstünlüklərini vurğulayır, metodu addım-addım göstərir və hər bir obyekt üçün uğurlu yerləşdirməni nümayiş etdirir. O, həmçinin ardıcıl yerləşdirmə və təmsilçi uğursuzluq hallarının nümunələrini göstərir. Kredit: Maria Bauza
SimPLE yanaşmasının əsasını təşkil edən üç modul nəticə etibarilə robot sistemlərə müxtəlif obyektlərin yüksək dəqiqliklə manipulyasiya edilməsi üçün möhkəm və səmərəli planlar hesablamağa imkan verir. Onun ən diqqətəlayiq üstünlüyü ondan ibarətdir ki, robotların əvvəllər real dünyadakı obyektlərlə qarşılıqlı əlaqəyə ehtiyacı olmayacaq ki, bu da onların öyrənmə prosesini xeyli sürətləndirir.
“Bizim işimiz bahalı real robot təcrübəsi tələb etmədən ümumiliyə nail olan dəqiq seçmə və yerləşdirmə yanaşmasını təklif edir” dedi Bauza və Bronars. “Bunu simulyasiya və məlum obyekt formalarından istifadə etməklə edir.”
Tədqiqatçılar təklif etdikləri metodu bir sıra təcrübələrdə sınaqdan keçiriblər. Onlar aşkar ediblər ki, bu, robot sisteminə müxtəlif forma və ölçülərə malik 15 növ obyekti uğurla seçib yerləşdirməyə imkan verir, eyni zamanda, robotlarda obyektlərin manipulyasiyasını təmin etmək üçün ilkin üsullardan üstündür.
. DOI: 10.1126/scirobotics.adi8808")
Qeyd edək ki, bu iş robotları mürəkkəb manipulyasiya tapşırıqları üzrə öyrətmək üçün həm vizual, həm də toxunma məlumatlarını birləşdirən ilk işlərdən biridir. Komandanın ümidverici nəticələri tezliklə digər tədqiqatçıları simulyasiyada öyrənmə üçün oxşar yanaşmalar hazırlamağa təşviq edə bilər.
“Bu işin praktiki nəticələri olduqca genişdir” dedi Bauza və Bronars. “SimPLE, avtomatlaşdırmanın artıq standart olduğu sənayelərdə, məsələn, avtomobil sənayesində yaxşı uyğunlaşa bilər, eyni zamanda avtomatlaşdırmanın daha az olduğu orta ölçülü fabriklər, xəstəxanalar, tibbi laboratoriyalar və s. kimi bir çox yarı strukturlaşdırılmış mühitlərdə avtomatlaşdırmanı təmin edə bilər adi haldır”.
Yarım strukturlaşdırılmış mühitlər ümumi tərtibat və ya struktur baxımından kəskin şəkildə dəyişməyən parametrlərdir, lakin eyni zamanda obyektlərin harada yerləşdirildiyi və ya müəyyən bir zamanda hansı tapşırıqların yerinə yetirilməli olduğu baxımından çevik ola bilər. SimPLE, robotların bu mühitlərdə geniş real dünya təlimi tələb etmədən tapşırıqları yerinə yetirməsinə imkan vermək üçün çox uyğun ola bilər.
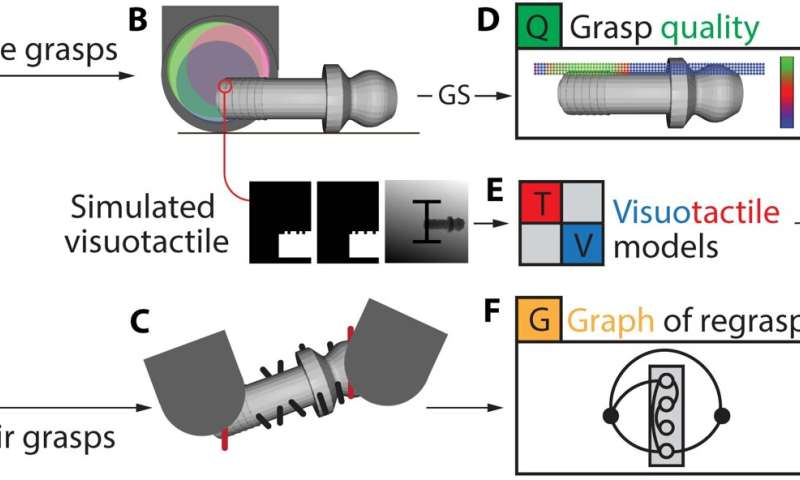 Simulyasiyada modellərin yaradılması. Obyektin CAD modelindən (A) başlayaraq biz obyektdə iki növ tutma nümunəsi götürdük. Cədvəl tutacaqları (B) obyektin stolun üzərində dayandığı pozadan əldə edilə bilər. Hər masanın qavrayışı üçün müvafiq dərinlik və toxunma təsvirlərini təqlid etdik və bu şəkillərdən vizual-taktil qavrayış modellərini öyrənmək üçün istifadə etdik (E). Havada olan tutuşlar (C) təkrar tutma zamanı əlçatandır. Biz kinematik cəhətdən mümkün olan havada tutma nümunələrini regrasps (F) qrafikinə birləşdirdik. Tutmanın müşahidə qabiliyyətini (Obs) və manipulyasiya qabiliyyətini (Mani) hesablamaq üçün vizual-toxunma modelindən və regrasp qrafikindən istifadə etdik və hər bir masa tutuşunun (D) keyfiyyətini qiymətləndirmək üçün bunları tutma sabitliyi (GS) ilə birləşdirdik. Kredit: Maria Bauza
Simulyasiyada modellərin yaradılması. Obyektin CAD modelindən (A) başlayaraq biz obyektdə iki növ tutma nümunəsi götürdük. Cədvəl tutacaqları (B) obyektin stolun üzərində dayandığı pozadan əldə edilə bilər. Hər masanın qavrayışı üçün müvafiq dərinlik və toxunma təsvirlərini təqlid etdik və bu şəkillərdən vizual-taktil qavrayış modellərini öyrənmək üçün istifadə etdik (E). Havada olan tutuşlar (C) təkrar tutma zamanı əlçatandır. Biz kinematik cəhətdən mümkün olan havada tutma nümunələrini regrasps (F) qrafikinə birləşdirdik. Tutmanın müşahidə qabiliyyətini (Obs) və manipulyasiya qabiliyyətini (Mani) hesablamaq üçün vizual-toxunma modelindən və regrasp qrafikindən istifadə etdik və hər bir masa tutuşunun (D) keyfiyyətini qiymətləndirmək üçün bunları tutma sabitliyi (GS) ilə birləşdirdik. Kredit: Maria Bauza Real dünyada yerləşdirmə. Bizim yanaşmamız əvvəlcə dərinlik təsvirindəki nümunələr dəstindən ən yaxşı qavrayışı seçir (A). Ən yaxşı qavrayış, görmə və əvvəlcədən hesablanmış tutma keyfiyyəti ballarını nəzərə alaraq, pozanın paylanması təxminini nəzərə alaraq ən yüksək gözlənilən keyfiyyətə malikdir. Sonra, biz ən yaxşı qavrayışı həyata keçirdik və indi orijinal dərinlik şəklinə (B) əlavə olaraq toxunma məlumatı daxil olmaqla poza təxminini yenilədik. Sonra, başlanğıc pozası kimi görmə və toxunma qabiliyyətindən ən yaxşı qiymətləndirməni götürdük və lazım gələrsə, regrasp qrafikindən istifadə edərək hədəf pozasına aparan bir plan tapdıq (C). Nəhayət, planı (D) icra etdik. Kredit: Maria Bauza
Real dünyada yerləşdirmə. Bizim yanaşmamız əvvəlcə dərinlik təsvirindəki nümunələr dəstindən ən yaxşı qavrayışı seçir (A). Ən yaxşı qavrayış, görmə və əvvəlcədən hesablanmış tutma keyfiyyəti ballarını nəzərə alaraq, pozanın paylanması təxminini nəzərə alaraq ən yüksək gözlənilən keyfiyyətə malikdir. Sonra, biz ən yaxşı qavrayışı həyata keçirdik və indi orijinal dərinlik şəklinə (B) əlavə olaraq toxunma məlumatı daxil olmaqla poza təxminini yenilədik. Sonra, başlanğıc pozası kimi görmə və toxunma qabiliyyətindən ən yaxşı qiymətləndirməni götürdük və lazım gələrsə, regrasp qrafikindən istifadə edərək hədəf pozasına aparan bir plan tapdıq (C). Nəhayət, planı (D) icra etdik. Kredit: Maria Bauza- Simulyasiyada modellərin yaradılması. Obyektin CAD modelindən (A) başlayaraq biz obyektdə iki növ tutma nümunəsi götürdük. Cədvəl tutacaqları (B) obyektin stolun üzərində dayandığı pozadan əldə edilə bilər. Hər masanın qavrayışı üçün müvafiq dərinlik və toxunma təsvirlərini təqlid etdik və bu şəkillərdən vizual-taktil qavrayış modellərini öyrənmək üçün istifadə etdik (E). Havada olan tutuşlar (C) təkrar tutma zamanı əlçatandır. Biz kinematik cəhətdən mümkün olan havada tutma nümunələrini regrasps (F) qrafikinə birləşdirdik. Tutmanın müşahidə qabiliyyətini (Obs) və manipulyasiya qabiliyyətini (Mani) hesablamaq üçün vizual-toxunma modelindən və regrasp qrafikindən istifadə etdik və hər bir masa tutuşunun (D) keyfiyyətini qiymətləndirmək üçün bunları tutma sabitliyi (GS) ilə birləşdirdik. Kredit: Maria Bauza
- Real dünyada yerləşdirmə. Bizim yanaşmamız əvvəlcə dərinlik təsvirindəki nümunələr dəstindən ən yaxşı qavrayışı seçir (A). Ən yaxşı qavrayış, görmə və əvvəlcədən hesablanmış tutma keyfiyyəti ballarını nəzərə alaraq, pozanın paylanması təxminini nəzərə alaraq ən yüksək gözlənilən keyfiyyətə malikdir. Sonra, biz ən yaxşı qavrayışı həyata keçirdik və indi orijinal dərinlik şəklinə (B) əlavə olaraq toxunma məlumatı daxil olmaqla poza təxminini yenilədik. Sonra, başlanğıc pozası kimi görmə və toxunma qabiliyyətindən ən yaxşı qiymətləndirməni götürdük və lazım gələrsə, regrasp qrafikindən istifadə edərək hədəf pozasına aparan bir plan tapdıq (C). Nəhayət, planı (D) icra etdik. Kredit: Maria Bauza
Bauza və Bronars izah etdi: “Bu parametrlərdə, strukturlaşdırılmamış obyektlər toplusunu strukturlaşdırılmış tənzimləmə halına gətirə bilmək istənilən aşağı axın vəzifəsi üçün imkan yaradır”. “Məsələn, tibbi laboratoriyada götür-qoy tapşırığına misal olaraq qutudan yeni sınaq borularının götürülməsi və onları dəqiq bir şəkildə rafa yerləşdirilməsi ola bilər. Borular düzüldükdən sonra onlar dizayn edilmiş maşına yerləşdirilə bilər. məzmununu yoxlamaq və ya digər elmi məqsədlərə xidmət edə bilər.”
Bu tədqiqatçılar qrupu tərəfindən hazırlanmış perspektivli metod tezliklə daha geniş simulyasiya edilmiş verilənlər və daha çox obyektin modelləri üzrə təlim keçə bilər ki, bu da onun performansını və ümumiləşdirilməsini daha da təsdiq etsin. Bu arada, Bauza, Bronars və onların həmkarları təklif etdikləri sistemin çevikliyini və möhkəmliyini artırmaq üçün çalışırlar.
“Gələcək işin iki istiqaməti robotun daha mürəkkəb tapşırıqları həll etmək üçün çevikliyini artırmaq və plan hesablamaq əvəzinə sensorların müşahidələri əsasında davamlı olaraq öz hərəkətlərini uyğunlaşdırmaq siyasətini hesablayan qapalı dövrə həllini təmin etməkdir. “Bauza və Bronars əlavə etdi.
“Biz tapşırığın icrası zamanı davamlı toxunma məlumatından istifadə edən TEXterity -də ikincidə irəliləyiş əldə etdik və davam edən tədqiqatlarımızda yüksək dəqiqlikli manipulyasiya üçün çeviklik və möhkəmliyi gücləndirməyə davam etməyi planlaşdırırıq.”
Daha çox məlumat: Maria Bauza və digərləri, SimPLE, obyektləri dəqiq seçmək, lokallaşdırmaq, yenidən qavramaq və yerləşdirmək üçün simulyasiyada öyrənilmiş vizuotaktil metod, Science Robotics (2024). DOI: 10.1126/scirobotics.adi8808
Jurnal məlumatı: Science Robotics

