Yeni robot sistemi incə göz əməliyyatı edə bilər
İnqrid Fadelli , Medical Xpress tərəfindən
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
Eksperimental qurğu, optik disk və damarlar da daxil olmaqla səkkiz retinal nümunə. Müəllif: Gui-Bin Bian
Torlu qişa venalarının okklyuziyası (RVO) gözün arxasındakı işığa həssas təbəqədə (yəni torlu qişada) bir vena tıxandıqda və bu da görmə itkisinə səbəb olduqda baş verən ağır bir xəstəlikdir. Hal-hazırda RVO-nu müalicə edən bir neçə tibbi müdaxilə mövcuddur, o cümlədən qan damarlarının anormal böyüməsini maneə törədən və şişkinliyi və iltihabı azaldan dərmanların və ya steroidlərin vaxtaşırı inyeksiyası.
RVO-nun müalicəsi üçün perspektivli bir prosedur torlu qişa venasının kanulyasiyasıdır (RVC). Bu, cərrahların tıxanmış venaya yüksək dəqiqliklə kiçik bir iynə vurmasını, laxtanı həll edən dərmanlar və ya qan damarlarının anormal böyüməsini idarə edən dərmanlar verməsini tələb edən çox incə bir cərrahi müdaxilədir.
Kanyulyasiya üçün hədəflənən retinal damarların qalınlığı insan saçına bənzər olduğundan, iynəni yüksək dəqiqliklə əl ilə daxil etmək çox çətindir. Robotlar potensial olaraq cərrahlara RVO prosedurlarını yerinə yetirməkdə kömək edə bilər və iynələrin düzgün şəkildə və xəstələrin retinanına zərər vermədən daxil edilməsini təmin edə bilər.
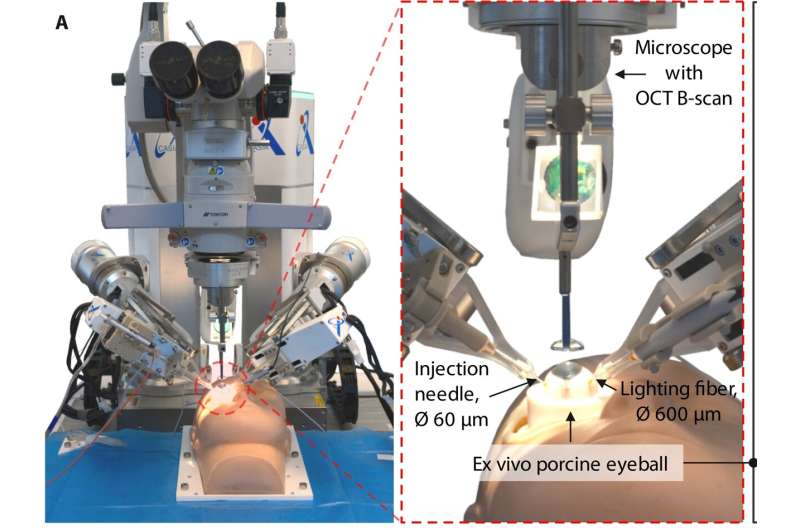
Cons Hopkins Universitetinin tədqiqatçıları bu prosedurları etibarlı şəkildə yerinə yetirə biləcək yeni bir muxtar robot sistemi hazırlayıblar. Science Robotics jurnalında dərc olunmuş məqalədə təqdim edilən bu sistem, cərrahi mikroskopla toplanan görüntüləri, eləcə də optik koherens tomoqrafiyası (OCT) adlanan görüntüləmə metodu ilə toplanan göz toxumasının kəsişmə skanlarını təhlil edən dərin öyrənmə alqoritmləri ilə idarə olunur .
Məqalənin ilk müəllifi Peiyao Zhang Medical Xpress-ə verdiyi açıqlamada bildirib ki, “Bu iş retinal mikrocərrahiyyənin həddindən artıq dəqiqlik və stabillik problemlərini həll etməkdəki uzunmüddətli marağımıza əsaslanır. Xüsusilə, retinal venaların kanülasiyası 100 mikrondan az dəqiqlik tələb edir ki, bu da normal insan fizioloji məhdudiyyətlərini aşır. Bu məqalənin əsas məqsədi robot yardımını dərin öyrənmə ilə birləşdirməklə əl ilə əldə edilməsi çətin olan dəqiqlik və təkrarlanma səviyyəsinə malik muxtar cərrahi iş axınına nail olmağın mümkün olduğunu göstərmək idi.”Oyna
01:11
01:16SəssizParametrlərPIPTam ekrana daxil olun
OynaTənəffüs kompensasiyası ilə ex vivo donuz gözü üzərində avtonom retinal vena kanülasiyası. Kredit: Science Robotics (2025). DOI: 10.1126/scirobotics.adw2969
Retina venasının kanulyasiya prosedurlarını avtomatlaşdırmaq üçün bir yanaşma
Zhang və həmkarları tərəfindən yaradılan robot sistemi, robotları idarə etmək üçün hesablama texnikalarını yüksək qətnaməli görüntüləmə və dərin öyrənmə alqoritmləri ilə birləşdirir. Komandanın sistemi, kiçik iynə və cərrahi alət saxlayan, stabil əlli göz robotları adlanan , retinal mikrocərrahiyyə əməliyyatları aparmaq üçün hazırlanmış iki robotdan ibarətdir.
Bu aparat, iynənin hərəkətini izləmək və iynənin təsirlənmiş retinal venalara düzgün daxil edilməsini təmin etmək üçün robotun hərəkətlərini planlaşdırmaq üçün təlim keçmiş üç dərin öyrənmə alqoritmi ilə birləşdirilir. Tədqiqatçılar indiyə qədər təklif etdikləri sistemi canlı donuzlarda və ya insanlarda nəfəs almanın yaratdığı hərəkətləri təqlid edən şəkildə hərəkətsiz və ya vaxtaşırı hərəkət etdirilən donuz gözləri üzərində sınaqdan keçiriblər.
“Biz inanırıq ki, uğurlu retinal vena kanülyasiyası üçün tələb olunan prinsiplər kimi mütəxəssis cərrahi biliklər dərin öyrənmə modellərinə daxil edilə bilər və bu da ixtisaslaşmış təlimi olmayan klinisyenlərə robotla dəstəklənən muxtar prosedurlar həyata keçirməyə və təcrübəli cərrahların nəticələri ilə müqayisə edilə bilən nəticələr əldə etməyə imkan verir”, – deyə Çjan izah edib.
“Biz həm statik, həm də şaquli hərəkət edən donuz gözlərində ardıcıl və dəqiq kanülasiya nümayiş etdirərək, nəzarətli təcrübələr vasitəsilə iş axınını təsdiqlədik.”
Komandanın təcrübələrində onların robot sisteminin hərəkətsiz donuz gözlərinin 90%-də və hərəkətli gözlərin 83%-də RVC-ni uğurla tamamladığı aşkar edilmişdir. Xüsusilə, komandanın sistemi iynənin nə vaxt toxunduğunu və torlu qişa venasına daxil olduğunu etibarlı şəkildə aşkarlaya bilirdi.Oyna
00:00
01:15SəssizParametrlərPIPTam ekrana daxil olun
OynaSabit ex vivo donuz gözü üzərində avtonom retinal vena kanülasiyası. Kredit: Science Robotics (2025). DOI: 10.1126/scirobotics.adw2969
Göz baxımı üçün növbəti addımlar və mümkün nəticələr
Bu yaxınlarda dərc olunmuş məqalənin nəticələri göstərir ki, robot sistemləri RVC prosedurlarını effektiv şəkildə yerinə yetirə bilər. Lakin, klinik şəraitdə tətbiq olunmazdan əvvəl, komandanın sistemi canlı heyvanlarla bağlı təcrübələrdə və insanlarda klinik sınaqlarda daha da qiymətləndirilməlidir.
“Məqaləmiz göstərir ki, yüksək həssas retinal cərrahi prosedur robot yardımı və dərin öyrənmədən istifadə edərək qismən təhlükəsiz, dəqiq və təkrarlana bilən şəkildə avtomatlaşdırıla bilər”, – deyə Zhang bildirib.
“Nəticələr cərrahın iş yükünü və dəyişkənliyini azaltmaqla yanaşı, dəqiqliyi artırmaq üçün konkret bir addımdır. Praktikada bu yanaşma çətin mikrocərrahi işlər zamanı oftalmoloji cərrahlara kömək edəcək gələcək klinik sistemləri dəstəkləyə bilər.”Avtonom torlu venanın kanülasiyası iş axınının qrafik xülasəsi. Müəllif: Zhang və digərləri, Science Robotics (2025)-dən uyğunlaşdırılmışdır.
Gələcəkdə Zhang və həmkarları tərəfindən təqdim edilən yeni robot sistemi göz cərrahları üçün dəyərli bir vasitə ola bilər və RVO xəstələri üçün müalicə variantlarını genişləndirə bilər. Bu arada, tədqiqatçılar sistemlərinin potensialını təsdiqləmək məqsədi daşıyan əlavə tədqiqatlar planlaşdırırlar.
“Növbəti addımımız bu iş axınını canlı heyvan tədqiqatlarında qiymətləndirmək olacaq”, – deyə Çjan əlavə edib. “Nəticə etibarilə məqsədimiz robotla dəstəklənən avtonom retinal vena kanülasyonunu real cərrahi şəraitə çevirməkdir.”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert İqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Əgər bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi (xüsusilə aylıq) nəzərdən keçirin. Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Peiyao Zhang və digərləri, Ex vivo donuz gözlərində dərin öyrənməyə əsaslanan muxtar retinal vena kanulyasiyası, Elm Robotikası (2025). DOI: 10.1126/scirobotics.adw2969
Jurnal məlumatları: Elmi Robototexnika
Əsas tibbi anlayışlar
Torlu qişa venasının okklyuziyasıDərin ÖyrənməTomoqrafiya, Optik KoherentlikKortikosteroidlər
Klinik kateqoriyalar
© 2026 Science X Network