Yeni sistem akustik robotlara obyektləri birgə daşımağa imkan verir
İndiyə qədər robotlar əsasən fərdi qaydada yerləşdirilsə də, komandalar şəklində onlar diqqətəlayiq sürət və səmərəliliklə daha geniş kompleks missiyaların öhdəsindən gələ bilirlər. Məsələn, onlar müxtəlif ərazilərdə hərəkət edərək və bəlkə də insanların daxil olmaq üçün çətin olduğu mühitlərdən keçərək obyektləri sürətlə hədəf yerlərə daşımağa kömək edə bilər.
London Universitet Kollecinin (UCL) tədqiqatçıları bu yaxınlarda robotlara insanların eşitmədiyi yüksək tezlikli səs dalğalarından istifadə etməklə obyektləri birgə daşımağa imkan verən yeni sistem hazırlayıblar . ArXiv preprint serverindəki məqalədə təsvir edilən bu sistem qida parçaları, zibil və ya digər xırda əşyaları yuvalarına daşıyarkən davranışlarını diqqətlə əlaqələndirən qarışqaların və digər həşəratların kollektiv dinamikasından ilhamlanıb.
Narsimlu Kemsaram, Akin Delibasi və onların həmkarları öz məqalələrində yazır: “Kooperativ nəqliyyat, bir obyektin birdən çox agent tərəfindən eyni vaxtda hərəkəti, dinamik mühitlərdə səmərəliliyi və uyğunlaşma qabiliyyətini artıran qarışqa koloniyaları kimi bioloji sistemlərdə geniş şəkildə müşahidə edilmişdir”. “Bu təbiət hadisələrindən ilhamlanaraq, biz təmassız obyektlərin havada daşınması üçün yeni akustik robot sistemi təqdim edirik.”
Kemsaram, Delibasi və onların həmkarları ultrasəs çeviricilərinə (yəni, ultrasəs səs dalğaları yayan kiçik cihazlar ) və bortda robot idarəetmə sisteminə əsaslanan robotlar tərəfindən obyektlərin birgə daşınması üçün yeni sistem hazırlayıblar . Kiçik ultrasəs yayan cihazlar akustik təzyiq sahələrini meydana gətirərək havada müdaxilə nümunələri yaradır.
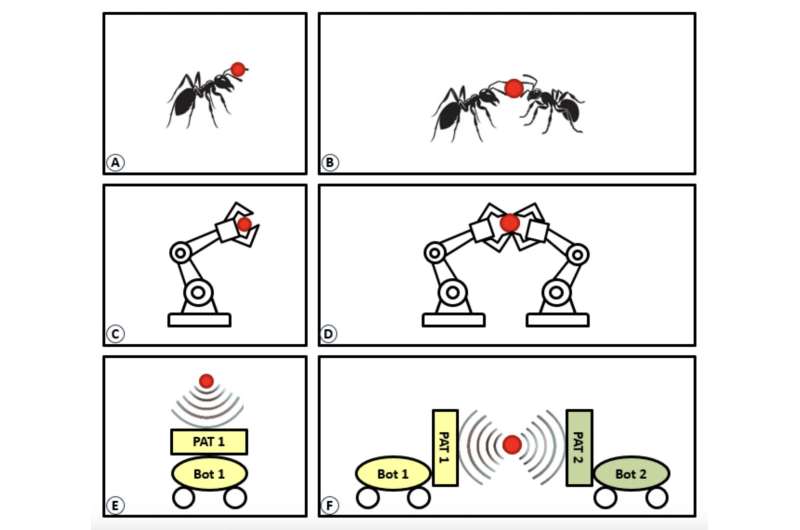
 Tək akustik robotun obyekti fiziki təmas olmadan hərəkət etdirdiyi müstəqil təmassız nəqliyyat və (B) akustik robotlar dəstəsinin obyekti birlikdə havada hərəkət etdirdiyi kooperativ təmassız nəqliyyat. Kredit: arXiv (2025). DOI: 10.48550/arxiv.2506.13957")
Bunlar mahiyyətcə səs təzyiqinin havada kiçik obyektləri tutmaq, qaldırmaq və saxlamaq üçün kifayət qədər güclü olduğu sahələrdir. Digər tərəfdən idarəetmə sistemi bu akustik sahələri xüsusi yerlərdə yaradır və robotlara havaya qaldırılan obyektləri yüksək dəqiqliklə idarə etməyə imkan verir.
https://googleads.g.doubleclick.net/pagead/ads?gdpr=0&us_privacy=1—&gpp_sid=-1&client=ca-pub-0536483524803400&output=html&h=280&slotname=2793866484&adk=161300458&adf=2636419947&pi=t.ma~as.2793866484&w=540&abgtt=6&fwrn=4&fwrnh=0&lmt=1751372385&rafmt=1&armr=3&format=540×280&url=https%3A%2F%2Ftechxplore.com%2Fnews%2F2025-06-acoustic-robots.html&fwr=0&rpe=1&resp_fmts=3&wgl=1&uach=WyJXaW5kb3dzIiwiMTkuMC4wIiwieDg2IiwiIiwiMTM3LjAuNzE1MS4xMjAiLG51bGwsMCxudWxsLCI2NCIsW1siR29vZ2xlIENocm9tZSIsIjEzNy4wLjcxNTEuMTIwIl0sWyJDaHJvbWl1bSIsIjEzNy4wLjcxNTEuMTIwIl0sWyJOb3QvQSlCcmFuZCIsIjI0LjAuMC4wIl1dLDBd&dt=1751372383037&bpp=3&bdt=1722&idt=1039&shv=r20250626&mjsv=m202506260101&ptt=9&saldr=aa&abxe=1&cookie=ID%3D594147a00c618f4c%3AT%3D1735548631%3ART%3D1751372383%3AS%3DALNI_MYbuCvlfveSCnpeUIQKyQ2DBT11fQ&gpic=UID%3D00000f84124e2904%3AT%3D1735548631%3ART%3D1751372383%3AS%3DALNI_Maf8g334ShSARz9IhljaNTJv-vUzg&eo_id_str=ID%3Ddf443988f1c5dd9b%3AT%3D1751372383%3ART%3D1751372383%3AS%3DAA-AfjbHWp2A8fZMRj4KcnZtIOEZ&prev_fmts=0x0%2C1521x730&nras=2&correlator=877077550298&frm=20&pv=1&rplot=4&u_tz=240&u_his=1&u_h=864&u_w=1536&u_ah=816&u_aw=1536&u_cd=24&u_sd=1.25&dmc=8&adx=395&ady=2179&biw=1521&bih=730&scr_x=0&scr_y=0&eid=95353387%2C95362655%2C95363434%2C95365226%2C95359265%2C95364331%2C95365119&oid=2&pvsid=7254171120895548&tmod=954340816&uas=0&nvt=1&ref=https%3A%2F%2Fphys.org%2F&fc=1920&brdim=0%2C0%2C0%2C0%2C1536%2C0%2C1536%2C816%2C1536%2C730&vis=1&rsz=%7C%7CpeEbr%7C&abl=CS&pfx=0&fu=128&bc=31&bz=1&td=1&tdf=2&psd=W251bGwsbnVsbCxudWxsLDNd&nt=1&ifi=2&uci=a!2&btvi=1&fsb=1&dtd=2321
Kemsaram, Delibasi və onların həmkarları yazır: “Sistemimiz havadakı hissəciklərin və robotların dəqiq manipulyasiyasına imkan verən lokallaşdırılmış akustik təzyiq sahələri yaratmaq üçün mərhələli ultrasəs çeviriciləri və bortda robot idarəetmə sistemindən istifadə edir”. “Biz səmərəliliyi və möhkəmliyi optimallaşdırmaq üçün bioloji sistemlərlə paralellər apararaq, təmassız obyekt-nəqliyyat strategiyalarını müstəqil nəqliyyat (koordinasiya olunmamış) və irəliyə doğru kooperativ nəqliyyat (koordinasiya edilmiş) kimi təsnif edirik. “
Tədqiqatçılar iki fərqli obyekt daşıma strategiyası hazırlayıblar: birincisi robotları müstəqil işləməyə sövq edir, ikincisi isə onları sürülərdəki həşəratların davranışını təqlid edərək öz hərəkətlərini əlaqələndirməyə sövq edir. Onlar öz sistemini təsdiqlədilər və inkişaf etdirdikləri akustik robotların prototiplərindən istifadə edərək bir sıra real təcrübələrdə hər iki strategiyanı sınaqdan keçirdilər.
Kemsaram, Delibasi və onların həmkarları izah etdilər: “Təklif olunan sistem ölçmə laboratoriyasında mikrofondan istifadə edərək levitasiya sabitliyini, faza-kosmos hərəkətini tutma sistemi vasitəsilə nəqlin səmərəliliyini və osiloskop vasitəsilə saat sinxronizasiyasının dəqiqliyini qiymətləndirməklə eksperimental olaraq təsdiq edilmişdir.” “Nəticələr həm müstəqil, həm də birgə hava-desant obyektlərinin daşınmasının mümkünlüyünü nümayiş etdirir.”
Gələcəkdə sistem real dünya problemlərinin həlli potensialını daha da qiymətləndirmək üçün daha geniş təcrübələr çərçivəsində təsdiqlənə bilər. O, materialların səmərəli idarə edilməsi və daşınması, eləcə də müxtəlif cihazların və məhsulların mikro montajı və potensial olaraq hətta bəzi biotibbi tətbiqlər üçün dəyərli ola bilər.
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış , Gaby Clark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Ətraflı məlumat: Narsimlu Kemsaram et al, A Cooperative Contactless Object Transport with Acoustic Robots, arXiv (2025). DOI: 10.48550/arxiv.2506.13957
Jurnal məlumatı: arXiv
© 2025 Science X Network