














Yeni yanaşma dron dəstələrinə yüksək sürətlə mürəkkəb mühitlərdə avtonom naviqasiya etməyə imkan verir
Ingrid Fadelli , Phys.org
Gaby Clark tərəfindən redaktə edilmişdir , Andrew Zinin tərəfindən nəzərdən keçirilmişdir
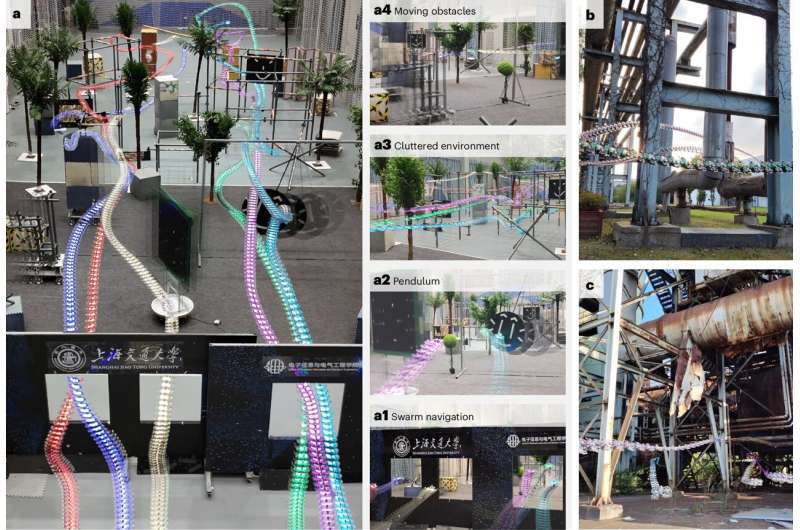
Redaktorların qeydləriDiferensiallaşdırıla bilən fizika ilə öyrədilmiş uçdan-uca neyron şəbəkə nəzarətçisindən istifadə edərək, dağınıq mühitlərdə görmə əsaslı çevik sürü naviqasiyası. Kredit: Nature Machine Intelligence (2025). DOI: 10.1038/s42256-025-01048-0
Adətən pilotsuz uçuş aparatları kimi tanınan pilotsuz uçuş aparatları (PUA) hazırda müxtəlif məqsədlər üçün videoların çəkilişi, bitkilərin və ya digər mühitlərin yuxarıdan monitorinqi, fəlakət zonalarının qiymətləndirilməsi və hərbi əməliyyatların aparılması da daxil olmaqla müxtəlif real işlərin öhdəsindən gəlmək üçün bütün dünyada geniş istifadə olunur. Geniş istifadəsinə baxmayaraq, mövcud dronların əksəriyyəti ya tam və ya qismən insan agentləri tərəfindən idarə edilməlidir.
Bundan əlavə, bir çox dronlar yaxınlıqdakı obyektlərlə toqquşmadan dağınıq, izdihamlı və ya naməlum mühitlərdə hərəkət edə bilmir. Bu mühitlərdə hərəkət edə bilənlər adətən qabaqcıl sensorlar, qrafik emal qurğuları (GPU) və ya simsiz rabitə sistemləri kimi bahalı və ya həcmli komponentlərə etibar edirlər .
Şanxay Jiao Tonq Universitetinin tədqiqatçıları bu yaxınlarda böcəklərdən ilham alan yeni bir yanaşma təqdim etdilər ki, bu da çoxsaylı dronlardan ibarət komandalara yüksək sürətlə hərəkət edərkən mürəkkəb mühitlərdə avtonom şəkildə naviqasiya etməyə imkan verə bilər. Nature Machine Intelligence -də nəşr olunan məqalədə təqdim olunan onların təklif etdiyi yanaşma həm dərin öyrənmə alqoritminə, həm də əsas fizika prinsiplərinə əsaslanır.
“Tədqiqatımız milçəklər kimi kiçik həşəratların inanılmaz uçuş imkanlarından ilhamlandı”, – məqalənin həm-baş müəllifləri professor Danpinq Zou və professor Weiyao Lin Tech Xplore-a bildiriblər. “Yalnız kiçik beyinə və məhdud qavrayışa malik olan bu cür kiçik canlıların çevik, ağıllı manevrlər – maneələrdən qaçmaq, havada uçmaq və ya yırtıcıları qovmaq bacarığı həmişə bizi heyrətləndirib.
“Uçuşun idarə edilməsi səviyyəsini təkrarlamaq uzun müddətdir ki, robototexnika sahəsində bir xəyal və əsas problemdir. Bu, sıx inteqrasiya olunmuş qavrayış, planlaşdırma və nəzarət tələb edir – bütün bunlar həşəratların beynində olduğu kimi çox məhdud təyyarə hesablamasında işləyir.”
Çoxsaylı dronların uçuşunu idarə etmək üçün ən ümumi hesablama yanaşmaları avtonom naviqasiya vəzifəsini ayrı-ayrı modullara, məsələn, vəziyyətin qiymətləndirilməsi, xəritələşdirilməsi, yolun planlaşdırılması, trayektoriyanın yaradılması və idarəetmə modullarına bölür. Bu alt tapşırıqların ayrıca həlli effektiv ola bilsə də, bəzən müxtəlif modullarda səhvlərin yığılmasına səbəb olur və dronların cavablarında gecikmə yaradır. Başqa sözlə desək, dronların maneələrə yaxınlaşdıqda daha yavaş reaksiya verməsinə səbəb ola bilər ki, bu da dinamik və qarışıq mühitlərdə toqquşma riskini artıra bilər.Oyna
00:0000:35SəssizParametrlərPIPTam ekrana daxil olun
OynaSürü təcrübələrinin orijinal qeydləri. Kredit: Nature Machine Intelligence (2025). DOI: 10.1038/s42256-025-01048-0
“Tədqiqatımızın əsas məqsədi yüngül süni neyron şəbəkəsinin (ANN) bu klassik boru kəmərini yığcam, uçdan-uca siyasətlə əvəz edə biləcəyini araşdırmaq idi” dedi Prof. Zou və Prof. Lin.
“Bu şəbəkə sensor məlumatlarını giriş kimi qəbul edir və birbaşa idarəetmə hərəkətlərini çıxarır – bu, milçəklərin mürəkkəb, ağıllı davranış yaratmaq üçün az sayda neyronlardan necə istifadə etdiyini əks etdirən paradiqma. Biz təkcə bioloji zərifliyə uyğun gəlməyə deyil, hissetmə və hesablamada minimalizmin hələ də yüksək performanslı avtonom uçuş təmin edə biləcəyini nümayiş etdirməyə çalışırdıq.”
Tədqiqatçılar tərəfindən hazırlanmış yeni sistem, ilk növbədə, 12×16 ultra aşağı ayırdetmə qabiliyyətinə malik dərinlik xəritəsi əsasında kvadrotorlu hava vasitəsi üçün idarəetmə əmrləri yarada bilən yeni hazırlanmış yüngül çəkili süni neyron şəbəkəsinə əsaslanır. Alqoritmə qidalanan xəritələrin tərifi aşağı olsa da, şəbəkənin ətraf mühiti anlamağa və hava vasitələrinin hərəkətlərini effektiv şəkildə planlaşdırmasına kifayət etdi.
“Biz bu şəbəkəni sadə həndəsi fiqurlardan – kublar, ellipsoidlər, silindrlər və təyyarələrdən ibarət xüsusi hazırlanmış simulyatorda öyrətdik və bu, bizə müxtəlif, lakin strukturlaşdırılmış mühitlər yaratmağa imkan verdi”, – Prof. Zou və Prof. Lin izah etdi. “Təlim prosesimiz diferensiallaşdırıla bilən fizikaya əsaslanan boru kəməri sayəsində yüksək səmərəlidir. O, həm tək agentli, həm də çox agentli təlim rejimlərini dəstəkləyir: çox agentli rejimdə digər dronlara öyrənmə zamanı dinamik maneələr kimi baxılır.”
Tədqiqatçılar tərəfindən hazırlanmış çox hava vasitəsi naviqasiya yanaşmasının əsas üstünlüyü ondan ibarətdir ki, o, yalnız üç konvolyusiya təbəqəsi olan yüksək yığcam və yüngül dərin neyron şəbəkəsinə əsaslanır. Tədqiqatçılar onu cəmi 21 dollara başa gələn quraşdırılmış hesablama lövhəsində sınaqdan keçirdilər və onun həm rəvan, həm də enerjiyə qənaətlə işlədiyini aşkar etdilər.
“Təlim cəmi 2 saat ərzində RTX 4090 GPU-da birləşir ki, bu da siyasətin öyrənilməsi üçün olduqca sürətlidir”, – professor Zou və Prof. “Sistemimiz təbii olaraq heç bir mərkəzləşdirilmiş planlaşdırma və ya açıq əlaqə olmadan çox robotlu naviqasiyanı dəstəkləyir və bu, sürü ssenarilərində miqyaslana bilən yerləşdirməyə imkan verir.”Komandanın neyron şəbəkəsi yalnız 21 dollara başa gələn aşağı səviyyəli inkişaf lövhəsində idarə olunur. Kredit: Zhang et al.
Bu sahədə əvvəlki ədəbiyyatı nəzərdən keçirdikdə, tədqiqatçılar dron naviqasiyası üçün bir çox dərin öyrənmə alqoritmlərinin real dünya ssenarilərində yaxşı ümumiləşdirilmədiyini aşkar etdilər. Bunun səbəbi çox vaxt onların gözlənilməz maneələri və ya ətraf mühitdəki dəyişiklikləri nəzərə almaması və insan ekspertləri tərəfindən etiketlənmiş böyük miqdarda uçuş məlumatları ilə təlim keçmələri tələb olunur.
“Ən mühüm tapıntımız ondan ibarətdir ki, kvadrotorun fizika modelinin birbaşa məşq prosesinə daxil edilməsi həm təlimin effektivliyini, həm də real dünya performansını – möhkəmlik və çeviklik baxımından əhəmiyyətli dərəcədə yaxşılaşdıra bilər”, – professor Zou və Prof.
“Diferensiallaşdırıla bilən fizikanın öyrənilməsi kimi tanınan bu texnika bizim tərəfimizdən icad edilməmişdir, lakin biz onu real dünyadakı kvadrotor nəzarətində uğurla tətbiq edən və genişləndirən ilk bizik. Bu araşdırma vasitəsilə biz həm də üç gözlənilməz, lakin güclü fikir əldə etdik – zəka, modellər və qavrayış haqqında düşüncələrimizi yenidən formalaşdıra biləcək dərslər.”
Prof. Zou, professor Lin və onların həmkarlarının əldə etdiyi ümidverici nəticələr mürəkkəb naviqasiya tapşırıqlarının həlli üçün kiçik süni neyron şəbəkəsi əsaslı modellərin potensialını nümayiş etdirir. Tədqiqatçılar göstərdilər ki, bu modellər tez-tez qəbul edildiyindən daha təsirli ola bilər və daha böyük modellərin necə işlədiyini anlamağa kömək edə bilər.
Professor Zou və Prof. Lin deyirlər: “Neyrologiya elmi ilkin irəliləyişini sadə neyron sxemləri təməl anlayışları açmağa kömək edən meyvə milçəyi vasitəsilə əldə etdiyi kimi, kiçik modellər də bizə qavrayış, qərar vermə və nəzarətin necə birləşdiyinə dair daha aydın fikir verir” dedi. “Bizim vəziyyətimizdə, 2 MB-dan az parametrləri olan bir model, heç bir əlaqə olmadan çox agentli koordinasiyanı təmin etdi – sadəliyin fövqəladə kəşfiyyata necə səbəb ola biləcəyini göstərir.”
Xüsusilə, tədqiqatçılar tərəfindən hazırlanmış yüngül model, simulyasiya edilmiş mühitdə təlim keçməsinə baxmayaraq, yaxşı performans göstərdi. Bu, xeyli miqdarda ekspert etiketli məlumat tələb edən əvvəllər hazırlanmış bir çox modeldən kəskin şəkildə fərqlidir.Oyna
00:00
01:01SəssizParametrlərPIPTam ekrana daxil olun
OynaDaxili görmə əsaslı sürü təcrübəsinin çox görüntülü oynatılması. Kredit: Nature Machine Intelligence (2025). DOI: 10.1038/s42256-025-01048-0
Tədqiqatçılar “Biz öyrəndik ki, kəşfiyyat kütləvi məlumat toplularından asılı olmamalıdır”. “Biz siyasətimizi tamamilə simulyasiyada – internet miqyaslı məlumatlar, əvvəlcədən toplanmış jurnallar və ya əl işi nümayişləri olmadan – yalnız bir neçə əsas tapşırıq və diferensiallaşdırıla bilən fizika mühərriki ilə təchiz edilmiş həndəsi mühitlərdən istifadə etməklə öyrətdik. Bu, “daha çox məlumat həmişə daha yaxşıdır” kimi ümumi fərziyyəni rədd edir və struktur uyğunlaşması və əvvəlki fiziki məlumatların həcmindən daha çox əhəmiyyət kəsb edə biləcəyini göstərir.”
Ümumilikdə, bu yaxınlarda aparılan tədqiqatın nəticələri göstərir ki, əsas fizika prinsipləri ilə idarə olunan neyron şəbəkələri milyonlarla təsvir, xəritə və ya digər etiketli məlumatlar üzərində təlim keçmiş şəbəkələrdən daha yaxşı nəticələr əldə edə bilər. Bundan əlavə, tədqiqatçılar aşkar etdilər ki, hətta aşağı dəqiqlikli dərinlikli təsvir də robotların davranışını dəqiq istiqamətləndirmək üçün istifadə edilə bilər.
Professor Zou və Professor Lin, “Görmə qabiliyyəti aşağı ayırdetmə qabiliyyətinə malik mürəkkəb gözlərlə məhdudlaşan, lakin inanılmaz hava bacarıqlarını idarə edən meyvə milçəyi kimi, biz də 20 m/s sürətlə uçan dronları idarə etmək üçün 12×16 piksel dərinlikdə təsvirlərdən istifadə etdik” dedi. “Bu, cəsarətli bir fərziyyəni dəstəkləyir: naviqasiya performansı yalnız sensorun sədaqətindən daha çox agentin fiziki dünya haqqında daxili anlayışından asılı ola bilər.”
Gələcəkdə professor Zou, professor Lin və həmkarları tərəfindən hazırlanmış yanaşma daha çox tipli hava gəmilərində tətbiq oluna və konkret real dünya ssenarilərində sınaqdan keçirilə bilər. Nəhayət, bu, ultra yüngül çəkili dronların öhdəsindən gələ biləcəyi vəzifələri genişləndirməyə kömək edə bilər, məsələn, onlara avtomatik selfi çəkməyə və ya yarış yarışlarında yarışmağa imkan verir. Bu yanaşma həmçinin idman və ya digər tədbirlərin yayımlanması, axtarış-xilasetmə əməliyyatları zamanı dağılmış binaların axtarışı və dağınıq anbarların yoxlanılması üçün faydalı ola bilər.
“Hazırda biz tam avtonom uçuş üçün dərinlik xəritələri əvəzinə optik axının istifadəsini araşdırırıq”, – professor Zou və professor Lin əlavə edib. “Optik axın əsas hərəkət siqnallarını təmin edir və həşəratların görmə qabiliyyətinin əsas komponenti kimi uzun müddət nevrologiyada öyrənilib.
“Bundan istifadə etməklə, biz həşəratların naviqasiya üçün istifadə etdiyi təbii strategiyaları təqlid etməyə daha da yaxınlaşacağımıza ümid edirik. Tədqiq etdiyimiz digər mühüm istiqamət, uçdan-uca öyrənmə sistemlərinin şərh edilməsidir.”
Komandanın yüngül neyron şəbəkəsinin real dünya təcrübələrində olduqca yaxşı performans göstərdiyi aşkar edilsə də, bu ümidverici nəticələrin necə işlədiyi hələ tam başa düşülməyib. Professor Zou və professor Lin növbəti tədqiqatlarının bir hissəsi olaraq şəbəkənin daxili təmsillərinə daha çox işıq salmağa ümid edirlər ki, bu da həşəratların ətraflarını necə emal etməsi və hərəkətlərini planlaşdırması ilə bağlı fikirlər təklif edə bilər.
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış , Gaby Clark tərəfindən redaktə edilmiş və Endryu Zinin tərəfindən yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu hesabat sizin üçün əhəmiyyət kəsb edirsə, lütfən, ianə (xüsusilə aylıq) nəzərdən keçirin. Siz təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Ətraflı məlumat: Diferensial fizika vasitəsilə görmə əsaslı çevik uçuşu öyrənmək. Təbiət Maşın Kəşfiyyatı (2025). DOI: 10.1038/s42256-025-01048-0 .
Jurnal məlumatı: Nature Machine Intelligence
© 2025 Science X Network

