














Yumşaq robot əl insan toxunuşuna nail olmaq üçün küncləri “görür”İnqrid Fadelli , Phys.org tərəfindən
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Redaktorların qeydləri
GIST
Tercih edilən mənbə kimi əlavə edin
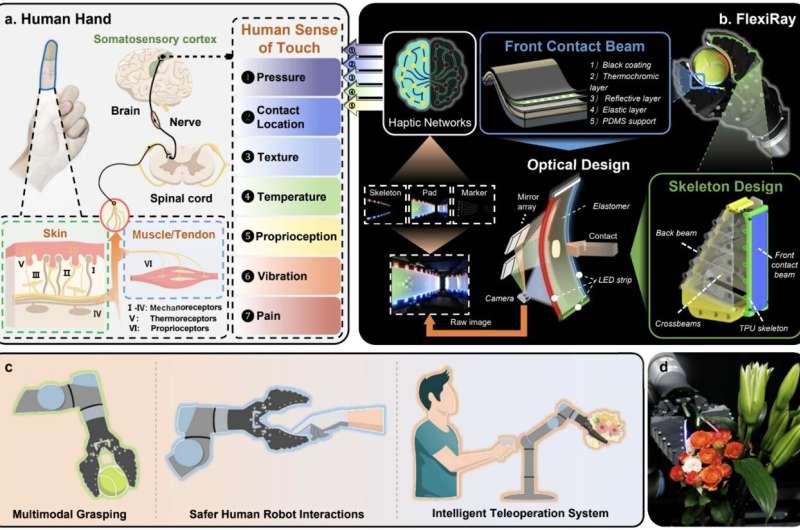
FlexiRay sensorunu insan əli qavrayışı üsulları və onun tətbiq ssenariləri ilə müqayisə edən illüstrasiya. Dizayn ilhamını, iş prinsipini və laylı quruluşu təqdim edir. Müəllif: Nature Communications (2025). DOI: 10.1038/s41467-025-67148-y.
Ev işlərini etibarlı şəkildə yerinə yetirmək, məhsullar yığmaq və digər əl işlərini yerinə yetirmək üçün robotlar, insanların toxunma hissi vasitəsilə əldə etdikləri məlumatlardan necə istifadə etdikləri kimi, işlədikləri obyektlərə əsasən manipulyasiya strategiyalarını uyğunlaşdıra bilməlidirlər. İnsanlar toxunma məlumatlarını dərilərindəki və əzələlərindəki sinirlər vasitəsilə əldə edərkən, robotlar ətraf mühiti hiss edən və müəyyən fiziki siqnalları qəbul edən sensorlara, cihazlara güvənirlər.
Öz-özünə konfiqurasiya edən optik cihazlar işığı necə ayırmağı avtomatik olaraq öyrənir
Play Video
İndiyə qədər hazırlanmış robot əllərin və tutacaqların əksəriyyəti vizual-toxunma sensorlarına, yəni kiçik kameralardan istifadə edərək görüntülər çəkən sistemlərə əsaslanır, eyni zamanda müəyyən obyektlərlə təmasdan yaranan səth deformasiyalarını da müəyyən edir.
Bu sensorların əsas məhdudiyyəti, kameraların yüksək keyfiyyətli görüntülər çəkməsini təmin etmək üçün onların sərt materiallardan hazırlanmasının vacibliyidir. Bu, sensorlara güvənən robotların ümumi elastikliyini azaldır və kövrək və qeyri-bərabər formalı obyektləri idarə etməyi çətinləşdirir.
Zhejiang Universitetinin tədqiqatçıları bu yaxınlarda innovativ mexaniki struktur və dərin öyrənmə alqoritmlərinin birləşməsi sayəsində bu məhdudiyyəti aradan qaldıra biləcək yeni robot əl olan FlexiRay-ı təqdim etdilər.
Nature Communications jurnalında dərc olunmuş məqalədə təqdim olunan robot əl, sıxıldıqda təbii olaraq içəri əyilən və sonra dərin öyrənmə alqoritmi ilə təhlil edilən deformasiya nümunələri yaradan çevik bir quruluşa əsaslanır.
Məqalənin baş müəllifi Huixu Dong Tech Xplore-a bildirib ki, “Bu əsərin ilham mənbəyi insan əlinin diqqətəlayiq imkanlarından irəli gəlir. Bu sistem yumşaq, rahat dərini təzyiq, tekstura və temperaturu eyni vaxtda qəbul edə bilən mürəkkəb sensor sistemi ilə birləşdirir”.
“Yumşaq robot sistemləri struktur uyğunluğu (təhlükəsizlik və uyğunlaşma) sahəsində böyük irəliləyişlər əldə etsə də, yüksək qətnaməli sensorların bu yumşaq cisimlərə inteqrasiyası böyük bir çətinlik olmuşdur. Əsas məqsədimiz yumşaq sensorlardakı “kor nöqtə” problemini həll etmək idi.”
Oyna
00:57
01:09
Səssiz
Parametrlər
PIP
Tam ekrana daxil olun
Oyna
İnsan-Robot Qarşılıqlı Əlaqələri. Müəllif: Nature Communications (2025). DOI: 10.1038/s41467-025-67148-y
FlexiRay: İnsandan ilhamlanan robot tutucu
Əvvəlki robototexnika ədəbiyyatını nəzərdən keçirərkən Donq və həmkarları mövcud vizual-toxunma sensorlarının əksəriyyətinin çox çevik olmadığını, çünki əhəmiyyətli səth deformasiyalarının quraşdırılmış kameraların görünüş sahəsinə mənfi təsir göstərə biləcəyini anladılar. Beləliklə, onlar obyektlərin ətrafında əhəmiyyətli dərəcədə deformasiyaya uğramış, bükülmüş və ya əyilmiş olsa belə, obyektləri yüksək dəqiqliklə hiss edə bilən alternativ bir tutucu dizayn etməyə başladılar.
Donq izah etdi ki, “FlexiRay toxunduğunu “görən” çevik robot barmaqdır. “O, balıq üzgəci kimi obyektləri passiv şəkildə sarmağa imkan verən Fin Ray Effect adlı bio-ilhamlanmış bir quruluş üzərində qurulub. Daxili kamera və unikal “çoxgüzgülü” optik sistemdən istifadə edərək işləyir.”
Adətən, yumşaq robot barmaq əyildikdə, içərisinə yerləşdirilmiş kameraların görünüş sahəsini bloklayır. Digər tərəfdən, komandanın tutacağı, barmaqlarının passiv deformasiyasına cavab olaraq kameranın görünüş sahəsini dinamik şəkildə yönləndirməyə imkan verən unikal daxili optik arxitekturaya malikdir.
Donq bildirib ki, “Əsasən, barmağın mexaniki deformasiyası optik sistemi künclərə “baxmağa” məcbur edir. Bu, FlexiRay-a təmas səthinin davamlı və maneəsiz görünüşünü qoruyarkən qeyri-müntəzəm obyektləri (məsələn, balıq üzgəci) əhatə etməyə imkan verir.
“Bu, struktur maneəni maneədən tam əhatəli hissetmə üçün funksional mexanizmə çevirir. Onun “qabığı” termokromik (istiliklə rəng dəyişən) və əks etdirici materiallardan ibarət çoxqatlı bir yastıqdır.”
FlexiRay-ın əsas üstünlüyü ondan ibarətdir ki, çox elastik materiallardan istifadə edilsə belə, vizual və toxunma məlumatlarını etibarlı şəkildə toplaya bilir. Tək kamera ilə robot tutucu tətbiq olunan qüvvəni, öz formasını və obyektə harada toxunduğunu, eləcə də obyektin teksturasını və temperaturunu dəqiq şəkildə aşkar edə bilir.
Donq bildirib ki, “İlkin sınaqlarda robot əlimiz hətta böyük deformasiyalar zamanı belə 90%-dən çox effektiv sensor əhatə dairəsinə nail olub . İşimizin ən diqqətəlayiq nailiyyəti “deformasiyadan qaçmaqdan” “deformasiyadan istifadəyə” paradiqma dəyişikliyidir. Biz göstərdik ki, robot barmaq sensor qavrayışdan ödün vermədən təhlükəsiz və itaətkar tutma üçün tələb olunan böyük passiv deformasiyalara nail ola bilər.”
Uzaqdan çay dəmləmə tapşırığında FlexiRay-ın nümayişi. Bu təcrübə sensorun multimodal qavrayış imkanlarının robotun çoxnövlü geribildirim təmin edərkən uzun ardıcıllıqlı teleəməliyyatı necə yerinə yetirməsinə imkan verdiyini sınaqdan keçirir. Mənbə: Nature Communications (2025). DOI: 10.1038/s41467-025-67148-y.
Robotlara obyektləri daha etibarlı şəkildə idarə etməyə imkan verir
Yeni təqdim edilən robot əl indiyə qədər çox ümidverici nəticələr əldə edib ki, bu da robotların tez-tez zəif idarə etdiyi həssas əşyalar və alətlərlə manipulyasiya potensialını vurğulayır. Komandanın prototip tutacağı tezliklə daha da təkmilləşdirilə və ya müəyyən real dünya tətbiqləri üçün uyğunlaşdırılmış sistemlər yaratmaq üçün digər komponentlərlə inteqrasiya edilə bilər.
Donq bildirib ki, “Yalnız kiçik, düz bir sahəni qavrayan sərt sensorlardan fərqli olaraq, FlexiRay obyektin formasına uyğunlaşdığı üçün böyük və effektiv sensor sahəsi əldə edir”.
“Böyük struktur deformasiyalarını etibarlı optik siqnallara çevirməklə, tək, möhkəm yumşaq bir bədəndə beş insana bənzər hiss orqanını (qüvvə, yer, tekstura, temperatur və propriosepsiya) uğurla təkrarladıq.”
Gələcəkdə FlexiRay, həssas kənd təsərrüfatı məhsullarından tutmuş qeyri-müntəzəm qablaşdırmalara qədər müxtəlif real dünya obyektlərinin manipulyasiyası üçün faydalı ola bilər. Keçmişdə təqdim edilən bir çox robot əllərdən daha yumşaq materiallara əsaslandığı üçün insanlara və ya asanlıqla zədələnə bilən obyektlərə yaxın yerləşdirildikdə daha təhlükəsiz ola bilər.
Donq əlavə edib ki, “Hazırda FlexiRay tutucu kimi fəaliyyət göstərir, lakin gələcək tədqiqatlarımız daha mürəkkəb manipulyasiyanı təmin etmək üçün bu texnologiyanı tam çoxbarmaqlı robot əllərə genişləndirməyi hədəfləyir”.
“Həmçinin, bu aparatı təqlid öyrənmə çərçivələri ilə inteqrasiya etməyi planlaşdırırıq . Bu, robotlara FlexiRay-ın fiziki dünyanı daha yaxşı başa düşmək üçün təqdim etdiyi zəngin toxunma və istilik məlumatlarından istifadə edərək çeviklik və təhlükəsizliyi birbaşa insan nümayişlərindən öyrənməyə imkan verəcək.”
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert İqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Əgər bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi (xüsusilə aylıq) nəzərdən keçirin. Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Daha çox məlumat: Yanzhe Wang və digərləri, Çevik robot əl, tam əhatəli insanabənzər multimodal haptik qavrayış üçün böyük deformasiyalardan istifadə edir, Nature Communications (2025). DOI: 10.1038/s41467-025-67148-y .
Jurnal məlumatları: Nature Communications
© 2026 Science X Network

