




18
Avq
Avq
Günəş tacının parlaqlığı ilə tac kütləsinin atılma sürəti arasında tərs əlaqə aşkar edildi
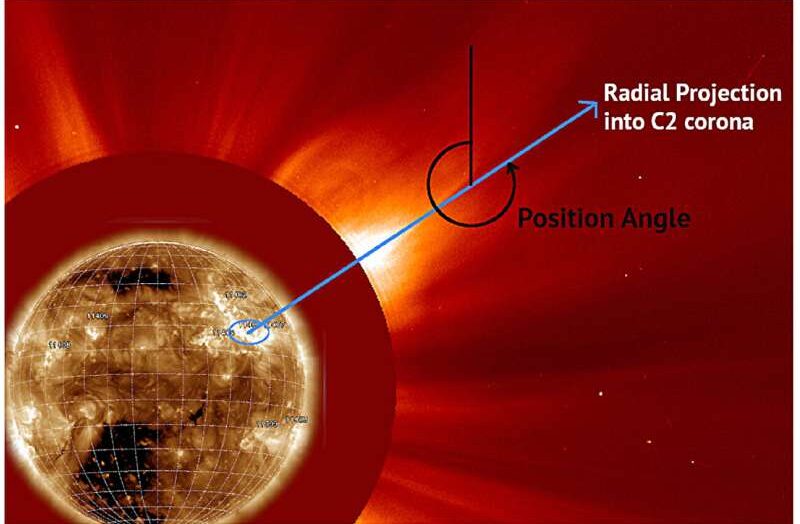
Dəniz Tədqiqat Laboratoriyası tərəfindən Gaby Clark tərəfindən redaktə edilmişdir , Andrew Zinin tərəfindən nəzərdən keçirilmişdir Redaktorların qeydləriGünəş diskindəki AR11401, SDO/AIA 193 Å tərəfindən 24 yanvar 2012-ci il, saat 13:00 UT-də göründüyü kimi, birbaşa onun üstündəki parlaq tac və LASCO C2 tərəfindən görüldüyü kimi, AR-dən tacda olan radial proyeksiya. Kredit: The Astrophysical Journal (2025). DOI: 10.3847/1538-4357/add3fb ABŞ Dəniz Tədqiqat Laboratoriyası (NRL) iyulun […]