




Bioilhamlanmış robot gözü sərt işıqlandırmaya tab gətirmək üçün bəbəyini tənzimləyir
Paul Arnold tərəfindən , Phys.org
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
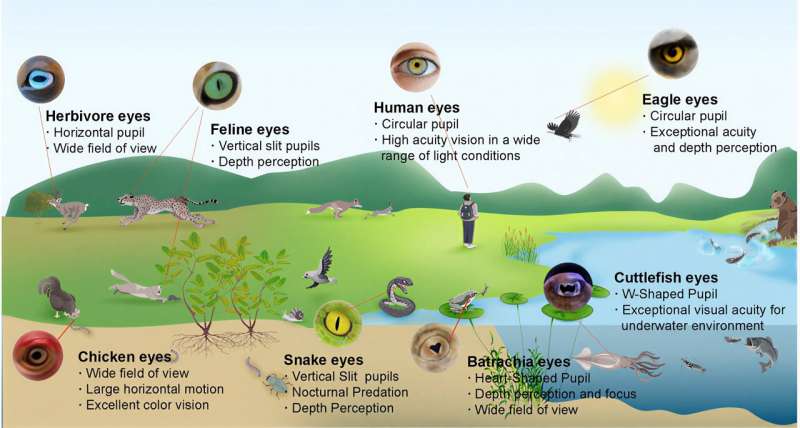
Bu sxem müxtəlif heyvan növləri arasında göz strukturlarının müxtəlifliyini göstərir və onların sərt təbii mühitlərin yaşam tələblərinə unikal göz adaptasiyalarını vurğulayır. Bu, maşın görmə qabiliyyətinin işıq intensivliyinə uyğunlaşmasını yaxşılaşdıran proqramlaşdırıla bilən deformasiya vasitəsilə işıq refleksi davranışlarına malik maye-metal əsaslı biomimetik bəbəklərin inkişafına ilham verir. Müəllif: Kun Liang
Robot görmə qabiliyyəti, dəyişən işıq səviyyələrinə cavab olaraq bəbək ölçüsünü avtomatik olaraq tənzimləyə bilən bioilhamlı bir gözün inkişafı sayəsində tezliklə inkişaf edə bilər. Robotlar, özünü idarə edən avtomobillər və dronlar tez-tez dinamik işıqlandırma ilə bağlı çətinlik çəkirlər. Əgər bir avtomobil qaranlıq tunelə girərsə, işıqlar sönəndə bəbəklərimizin etdiyi kimi, görmək üçün kifayət qədər işıq tutmaq üçün kamera diafraqması geniş açıq qalmalıdır. Lakin gün işığına çıxdıqda, parıltı onu dərhal kor edə bilər.
“Science Robotics” jurnalında dərc olunmuş bir araşdırmada tədqiqatçılar yalnız gözlərin görmə tərzini təqlid etməklə yanaşı, həm də işıq şəraitinə uyğunlaşan bioilhamlı görmə sistemi yaratdıqlarını ətraflı izah edirlər. Texnologiya standart kameranın görmə tərzi ilə canlıların ətraf mühitə baxışı arasındakı boşluğu aradan qaldırmaq üçün hazırlanmışdır.
Kameralar yüksək qətnaməli şəkillər çəkməkdə üstün ola bilər, lakin dinamik mühitlərdə uyğunlaşmaq üçün kifayət qədər elastikliyə malik deyillər.Oyna
00:00
00:37SəssizParametrlərPIPTam ekrana daxil olun
Uyğunlaşa bilən robot gözlər
Bu problemi həll etmək üçün tədqiqatçılar əvvəlcə bioloji göz almasının formasını təqlid edən əyri görüntüləmə massivi yaratdılar . Bu, adətən düz sensorlara malik standart kameralardan çox fərqlidir. Bu yarımkürəvi “retina” məkan təhriflərini azaldan və sistemin ətrafdakıları eyni anda daha çox görməsinə imkan verən ultrageniş bir baxış sahəsinə malikdir.
Həmçinin, ultrabənövşəyidən infraqırmızıya qədər dalğa uzunluqlarını aşkar edə bilən işığa həssas materialdan hazırlanmışdır .
Komanda həmçinin insan gözünün kommunikasiya sistemini təqlid etdi. Canlı göz bir şeyi görəndə beyinə sinir impulsları göndərir. Bunu yenidən yaratmaq üçün tədqiqatçılar duzlu suya bənzər məhlul ilə doldurulmuş kiçik bir kanalın içərisində EGaIn adlı maye metaldan istifadə etdilər.
İşıq sensorlara dəydikdə, maye metalı hərəkət etdirən bir cərəyan yaradır. Hər dəfə bir elektroda dəydikdə, bir dövrəni tamamlayır və süni göz bəbəyinə (ikinci, ayrı maye-metal komponenti) elektrik siqnalı göndərir və işığa cavab olaraq ölçüsünü tənzimləmək üçün siqnal verir.Oyna
00:00
00:31SəssizParametrlərPIPTam ekrana daxil olun
İşıq nə qədər parlaq olarsa, bu sıçrayışlar bir o qədər tez-tez baş verir və maye metalın yayılmasına və dəliyin daha çox hissəsini örtməsinə səbəb olur. Zəif işıqda sıçrayışlar yavaşlayır və metal daha çox işığı içəri buraxmaq üçün geri çəkilir.
Metal maye olduğundan, bəbək pişikəbənzər gözlər üçün şaquli yarıqlar kimi müxtəlif formalar ala bilər.
Komanda öz məqalələrində qeyd edib ki, “Bu sistem güclü plastiklik nümayiş etdirir və bir çox növün göz bəbəyinin işıq reflekslərini təqlid etmək üçün əhəmiyyətli potensiala malikdir”.3D yarımkürəvi süni tor qişa. Kredit: Kun Liang
Daha ağıllı gözlər
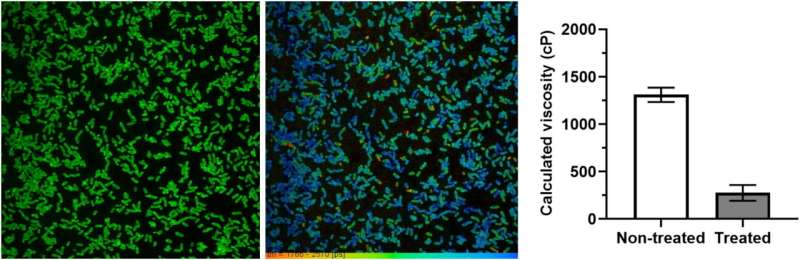
Sınaqlarda maye metal göz maşınların sərt işıqda “görməsində” böyük bir irəliləyiş göstərdi. Süni bəbək sabit ölçüdə kilidləndikdə, həddindən artıq işıqlandırma şəraitində 68,38% təsvir tanıma dəqiqliyinə nail oldu. Lakin adaptiv bəbək işə salındıqda bu rəqəm 83,56%-ə çatdı.
Komanda əlavə edib ki, “Tədqiqatımız süni görmə sistemlərinin vizual performansını artırmaqla yanaşı, həm də onların dinamik mühitlərdə uyğunlaşma qabiliyyətini gücləndirir”.
Mövcud göz konsepsiyanın sübutudur. Tədqiqatın növbəti addımları arasında sistemi daha kiçik və daha inteqrasiya olunmuş etmək, eləcə də daha mürəkkəb şagird dizaynlarını araşdırmaq var.
Müəllifimiz Paul Arnold tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert Eqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi düşünün (xüsusilə aylıq). Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Kun Liang və digərləri, Maşın görmə üçün maye metal forma dəyişdiricilərinə əsaslanan bioinspirasiya olunmuş adaptiv bəbək refleksi, Elm Robotikası (2026). DOI: 10.1126/scirobotics.adx0715
Jurnal məlumatları: Elmi Robototexnika
Əsas anlayışlar
Təcəssüm etdirən robot manipulyasiyaBioilhamlanmış yumşaq robotlarHesablama 3D görməMuxtar robot lokomotivi
© 2026 Science X Network