








Humanoid robotlar parkuru mənimsəyir və insana bənzər çeviklik qazanırlar
İnqrid Fadelli tərəfindən , Phys.org
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
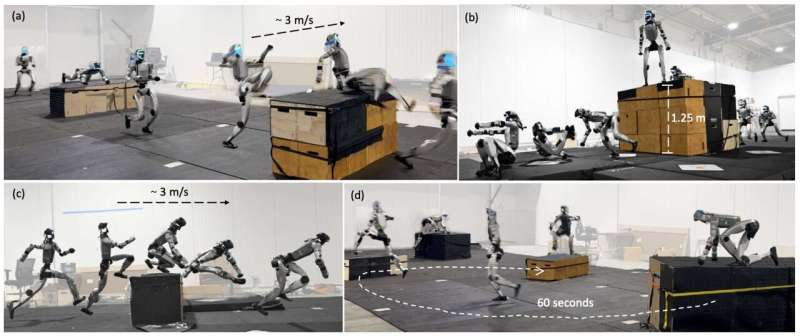
Perseptiv Humanoid Parkour (PHP), Unitree G1 humanoid robotuna bort qavrayışından istifadə edərək yüksək dinamik, uzun üfüqdə parkour davranışlarını həyata keçirməyə imkan verir. Hərəkət uyğunluğu və müəllim-tələbə təlimi vasitəsilə müxtəlif çevik insan bacarıqlarını yaratmaqla, biz (a) qısa maneənin üzərindən pişik kimi tullanmaq, ardınca təxminən 3 m/s sürətlə daha hündür maneənin üzərindən sürətlə tullanmaq, (b) 1,25 m (robot hündürlüyünün 96%-i) divara dırmaşmaq və aşağı yuvarlanmaq, (c) təxminən 3 m/s sürətlə maneənin üzərindən sürətlə tullanmaq və (d) muxtar bacarıq seçimi və sorunsuz keçidlərlə mürəkkəb parkour kursunun 60 saniyəlik fasiləsiz keçidi daxil olmaqla mürəkkəb təmasla zəngin manevrlərə qadir olan vahid çoxbacarıqlı vizualmotor siyasətini öyrədirik. Kredit: Wu və başqaları.
İnsanabənzər bədən quruluşuna malik robot sistemləri olan humanoid robotlar, hazırda insanlar tərəfindən yerinə yetirilən müxtəlif real həyat tapşırıqlarını həll etmək potensialına malikdir. Son illərdə bir çox robototexnika tədqiqatçıları və kompüter alimləri bu robotların imkanlarını genişləndirməyə və ətraf mühitdə hərəkətlərini təkmilləşdirməyə çalışırlar.
Amazon Frontier AI & Robotics (FAR) və Kaliforniya Universiteti Berkli (UC Berkeley) tədqiqat qrupu bu yaxınlarda humanoid robotların şəhər və ya təbii mühitlərdə maneələrin üzərindən qaçaraq, tullanmaqla və dırmaşmaqla diqqətəlayiq çevikliklə hərəkət etməsinə imkan verən perceptive humanoid parkour (PHP) çərçivəsini təqdim etdi. Onların arXiv preprint serverində dərc olunmuş məqalədə qeyd olunan təklif etdiyi yanaşma, praktikantlara çeviklik və bədən güclərindən istifadə edərək mühitlərdə sürətlə hərəkət etməyə imkan verən məşhur şəhər idman növü olan parkourla məşğul olan insanların qeydləri üzərində hesablama modellərinin öyrədilməsini nəzərdə tutur.
Zhen Wu, Xiaoyu Huang və həmkarları məqalələrində yazırdılar ki, “Humanoid hərəkət sahəsindəki son nailiyyətlər müxtəlif ərazilərdə sabit yeriməyə imkan versə də, yüksək dinamik insan hərəkətlərinin çevikliyini və uyğunlaşmasını ələ keçirmək açıq bir problem olaraq qalır”.
“Xüsusilə, mürəkkəb mühitlərdə çevik parkur təkcə aşağı səviyyəli möhkəmlik deyil, həm də insana bənzər hərəkət ifadəliliyi, uzun üfüqdə bacarıq kompozisiyası və qavrayışa əsaslanan qərar qəbuletmə tələb edir. Biz humanoid robotlara çətin maneə yollarında uzun üfüqdə, görmə əsaslı parkuru avtonom şəkildə yerinə yetirməyə imkan verən modulyar bir çərçivə olan PHP-ni təqdim edirik.”Hərəkət uyğunluğu vasitəsilə sintez edilən müxtəlif tərkibli parkur bacarıqları. (a) Müxtəlif yanaşma məsafələri müxtəlif addım fazalarını və giriş pozalarını tetikler. (b) Müxtəlif lokomotiv sürətləri, istiqamətləri və müddətləri. (c) Təsadüfi ərazi pozaları və formaları. Mənbə: arXiv (2026). DOI: 10.48550/arxiv.2602.15827
Robotlarda insana bənzər hərəkətlərə nail olmaq üçün bir yanaşma
Vu, Huanq və həmkarları əvvəlcə insan parkur məşqçilərinin müxtəlif dinamik hərəkətlər etdiyi videolardan ibarət məlumat dəsti topladılar. Daha sonra bu hərəkətləri hamar hərəkətlər seriyası yaratmaq üçün birləşdirilə bilən daha kiçik və təkrar istifadə edilə bilən hərəkətlərə ayırdılar.
Wu, Huang və həmkarları yazırdılar ki, “İlk yanaşmamız , hədəflənmiş atom insan bacarıqlarını uzun üfüq kinematik trayektoriyalara çevirmək üçün xüsusiyyət məkanında ən yaxın qonşu axtarışı kimi formalaşdırılmış hərəkət uyğunlaşdırmasından istifadə edir .” “Bu çərçivə dinamik insan hərəkətlərinin zərifliyini və axıcılığını qoruyarkən mürəkkəb bacarıq zəncirlərinin çevik tərkibini və hamar keçidini təmin edir.”
Tədqiqatçılar, robot mühərriklərinin hərəkətlərini planlaşdıran proqram komponentləri olan kontrollerləri məlumat dəstindən əldə etdikləri dinamik parkur hərəkətləri üzrə öyrədiblər. Onlar bunu hesablama modellərinə sınaq və səhv prosesi vasitəsilə bacarıqlar əldə etməyə imkan verən gücləndirmə öyrənməsi (RL) kimi tanınan bir yanaşmadan istifadə edərək ediblər.
Nəzarətçilər müəyyən hərəkətlərin icrası üzrə təlim keçdilər. Daha sonra, robotların ətraflarındakı maneələri səmərəli şəkildə dəf etmək üçün yerinə yetirməli olduqları hərəkət ardıcıllığını planlaşdırmaq üçün təsvirlərə əsaslanan tək bir nəzarətçiyə çevrildilər.
“Əsasən də, qavrayış və bacarıq kompozisiyasının birləşməsi muxtar, kontekstdən xəbərdar qərar qəbul etməyə imkan verir: yalnız bortda dərinlik sensoru və diskret 2D sürət əmrindən istifadə edərək robot müxtəlif həndəsə və hündürlükdə maneələrin üzərindən keçmək, dırmaşmaq, tullanmaq və ya yuvarlanmaq qərarını verir və icra edir”, – müəlliflər yazıblar.
Humanoid robotların imkanlarının genişləndirilməsi
Tədqiqatçılar artıq bir sıra real təcrübələrdə öz çərçivələrini qiymətləndiriblər və onu Çin robototexnika şirkəti Unitree tərəfindən hazırlanmış humanoid robota tətbiq ediblər. İlkin tapıntılar çox ümidverici idi, çünki robot diqqətəlayiq çevikliklə hərəkət edə, parkur məşqçilərinin hərəkətlərinə bənzər hərəkətlərlə maneələri səmərəli şəkildə aşa və dırmaşa bilirdi.
Müəlliflər yazırdılar ki, “Biz Unitree G1 humanoid robotu üzərində geniş real təcrübələr apararaq çərçivəmizi təsdiqləyirik. Bu təcrübələr nəticəsində 1,25 m-ə qədər (robotun hündürlüyü 96%) hündür maneələrə dırmanmaq, eləcə də real vaxt maneə pozuntularına qapalı dövrə uyğunlaşması ilə uzun üfüqdə çoxmaneəli maneələri keçmək kimi yüksək dinamik parkur bacarıqları nümayiş etdirilir”.
Vu, Huanq və həmkarları tərəfindən hazırlanmış RL əsaslı yanaşma tezliklə humanoid robotlarda digər inkişaf etmiş insan hərəkətlərini və davranışlarını təkrarlamaq üçün istifadə edilə bilər. Bundan əlavə, o, daha geniş humanoid robotlarda və ya daha real mühitlərdə sınaqdan keçirilə bilər.
Gələcəkdə komandanın çərçivəsi, ətraf mühitdə insana bənzər və ya hətta fövqəltəbii çevikliklə hərəkət edə bilən, istənilən yerlərə daha sürətli və daha səmərəli şəkildə çata bilən robotların yerləşdirilməsinə töhfə verə bilər. Bu robotlar fəlakətlərə cavab vermə tapşırıqlarından və axtarış-xilasetmə əməliyyatlarından tutmuş sənaye sahələrinin yoxlanılmasına və təhlükəli mühitlərin araşdırılmasına qədər müxtəlif missiyaları yerinə yetirə bilər.
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert İqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Əgər bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi (xüsusilə aylıq) nəzərdən keçirin. Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .
Nəşr detalları
Zhen Wu və digərləri, Qavrayışlı Humanoid Parkour: Hərəkət Uyğunluğu Vasitəsilə Dinamik İnsan Bacarıqlarının Zəncirlənməsi, arXiv (2026). DOI: 10.48550/arxiv.2602.15827
Jurnal məlumatı: arXiv
Əsas anlayışlar
© 2026 Science X Network

