





Alimlər materialları sadəcə fırlatmaqla proqramlaşdırırlar
Ecole Polytechnique Federale de Lausanne tərəfindən
Stephanie Baum tərəfindən redaktə edilib , Robert Egan tərəfindən nəzərdən keçirilib
Tercih edilən mənbə kimi əlavə edin
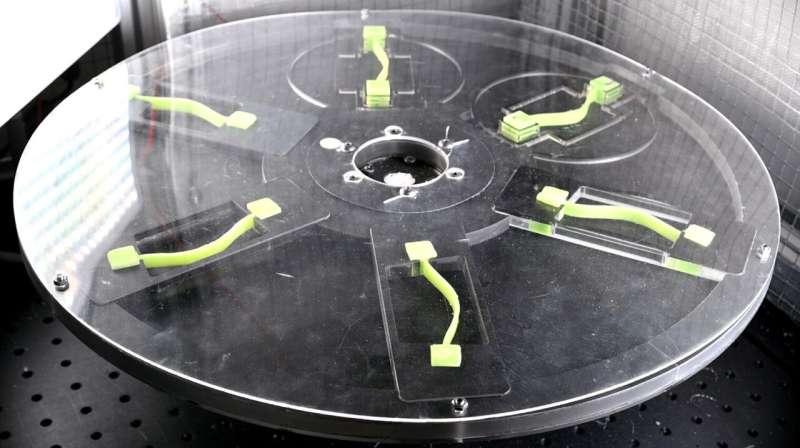
Fırlanan platformada dinamik sürücünün nümayişi. Müəllif: 2026 fleXLab EPFL CC BY SA
Şapalaq bilərzikdə universal cəlbedici bir şey var və sadə bir toxunuş onun düz forma ilə burulmuş forma arasında keçidinə səbəb olur. Yəqin ki, bilmədiyiniz şey, şapalaq bilərzikinin qənaətbəxş bir çırpınmasının ikiqat sabit strukturların arxasındakı eyni prinsip olduğunu göstərir. Bunlar məlumatları birbaşa mexaniki bitlər (m-bitlər) kimi fiziki formalarında saxlamaq üçün iki sabit mövqe (biri 0, digəri isə 1) arasında keçid edə bilər.
Robot və digər mexaniki sistemlərin səmərəli idarə olunması üçün maraqlı potensiala malik olduqları üçün tədqiqatçılar illərdir proqramlaşdırıla bilən strukturlara (proqramlaşdırıla bilən metamateriallara) malik xüsusi materiallar hazırlayırlar. Lakin indiyə qədər bu cür sistemlərin faktiki proqramlaşdırılması böyük bir çətinlik olub: mexaniki hissələr adətən fərdi şəkildə idarə olunmalıdır ki, bu da olduqca çətin və vaxt aparan bir işdir.
İndi EPFL-in Mühəndislik Məktəbindəki Çevik Strukturlar Laboratoriyasında (fleXLab), Hollandiyanın AMOLF tədqiqat institutunda və Leyden Universitetinin tədqiqatçıları metamaterialları qlobal miqyasda təəccüblü dərəcədə sadə bir həll yolu ilə proqramlaşdırmağın bir yolunu tapdılar: fırlanma. Fırlanan platformanın sürətini, istiqamətini və sürətlənməsini tənzimləməklə, tədqiqatçılar fırlanan sistemdə yaranan qüvvələri – məsələn, mərkəzdənqaçma və Eyler qüvvələrini – elastik şüaların irəli və irəli çırpılmasını təmin etmək üçün istifadə edə və eyni anda birdən çox mexaniki hissəni “yazmaq” üçün sadə və yeni bir yol yarada bilərlər.
Əsər Science Advances jurnalında dərc olunub .
fleXLab rəhbəri Pedro Reis izah edir: “Yanaşmamızın gözəlliyi ondadır ki, o, bizə fırlanma yolu ilə mexaniki metamaterial sisteminin yaddaşını qlobal miqyasda qurmağa imkan verir. Yaddaş saxlama mexaniki hesablama və yumşaq robototexnika tətbiqlərinin vacib bir hissəsidir və fiziki zəka elementlərini birbaşa onları qurmaq üçün istifadə olunan materiallara yerləşdirən gələcək sistemlərin inkişafı üçün istifadə edilə bilər.”Oyna
00:00
00:06SəssizParametrlərPIPTam ekrana daxil olun
Tək fırlanma ilə yazım
Dinamik sürücülüyü nümayiş etdirmək üçün tədqiqatçılar əlifbanın bütün 26 böyük hərfini fırlanan platformalarına quraşdırılmış beş barmaq ölçülü silikon şüalardan istifadə edərək “yazdılar”. Əvvəlcə, hər hərfə ASCII simvol kodlaşdırma standartından istifadə edərək 0 və 1-dən ibarət 5 rəqəmli rəqəm təyin etdilər. Daha sonra, hər şüanın platformaya bərkidilməsini elə tənzimlədilər ki, o, fərqli fırlanma parametrləri həddi ilə iki sabit mövqeyindən birinə (sola və ya sağa çevrilmiş) əyilsin.
Bu vaxt platformanın özü fırlanmasını idarə etmək üçün yüksək fırlanma momentli mühərrikə qoşulmuşdu. “Sıxılma həddinə” çatıb-çatmamalarından asılı olaraq, şüalar ya orijinal istiqamətlərində qalacaq, ya da çevriləcəkdi. Tədqiqatçılar beş şüanın hamısının son mövqelərini müvafiq ikili naxışlarına uyğunlaşdırmaqla kodladıqları hərfləri oxuya bildilər.
“İstifadə etdiyimiz yüksək fırlanma momentli yarımkeçirici mühərriklər kimi mühərrik texnologiyası, mexaniki metamaterialları bu şəkildə dinamik şəkildə “yazmaq” üçün kifayət qədər güclü və dəqiq hala gəldi”, – həmmüəllif Eduardo Qutyerrez-Prieto qeyd edir.Orbitlər, keçidlər və vəziyyətlər. Müəllif: Science Advances (2026). DOI: 10.1126/sciadv.aec1606
Ağıllı, uzaqdan idarə olunan sistemlərə doğru
Tədqiqatçılar real həyatda tətbiqlər üçün dinamik idarəetmə metodlarını inkişaf etdirirlər və Reis vurğulayır ki, fırlanma platformasının nümayişi fırlanma ilə induksiya olunan qüvvələrin mexaniki metamaterialları necə idarə edə biləcəyinə dair yalnız bir nümunədir. Biotibbdə mərkəzdənqaçma qüvvəsinin gücündən mərkəzdənqaçma mikrofluidik kanallar daxilində kiçik bistabil klapanları açmaq və ya bağlamaq, mayeləri diaqnostik cihazlar vasitəsilə idarə olunan, yüksək məhsuldarlıqla istiqamətləndirmək üçün istifadə etmək olar.
Eynilə, elektronikasız yumşaq robotlar, pnevmatik və ya hidravlik xətlər vasitəsilə ötürülən hava və ya su təzyiqindəki dəyişikliklərə cavab olaraq hərəkət edən və göyərtədəki dövrə olmadan mürəkkəb hərəkətə imkan verən bistabil birləşmələrlə təchiz oluna bilər.
AMOLF tədqiqatçısı Martin van Hekke ümumiləşdirərək bildirib ki, “Dinamik idarəetmə paradiqmamız mikrofluidik və implantlardan tutmuş ağıllı infrastruktur və sualtı və ya tibbi robotlara qədər geniş fiziki sistem tətbiqlərində səmərəli şəkildə işləyə bilən ağıllı, uzaqdan idarə olunan cihazlara doğru çox yönlü bir yol təklif edir”.
Nəşr detalları
Eduardo Gutierrez-Prieto və digərləri, Dinamik sürücülər hədəf yaddaş üçün material bitlərinin müstəqil idarə olunmasına imkan verir, Science Advances (2026). DOI: 10.1126/sciadv.aec1606
Jurnal məlumatları: Elmin irəliləyişləri
Əsas anlayışlar
Neyromorfik süni intellekt avadanlığıHesablama əlavə istehsalıTəcəssüm etdirən robot manipulyasiyaBioilhamlanmış yumşaq robotlarDartıla bilən bioelektronikaEcole Polytechnique Federale de Lausanne tərəfindən təmin edilmişdir

