

FingerEye təmasdan əvvəl və sonra robotun idarə olunmasını yaxşılaşdırmaq üçün toxunma və görmə qabiliyyətini birləşdirir
İnqrid Fadelli , Phys.org tərəfindən
redaktə edən: Gaby Clark , rəy verən: Robert Egan
Tercih edilən mənbə kimi əlavə edin
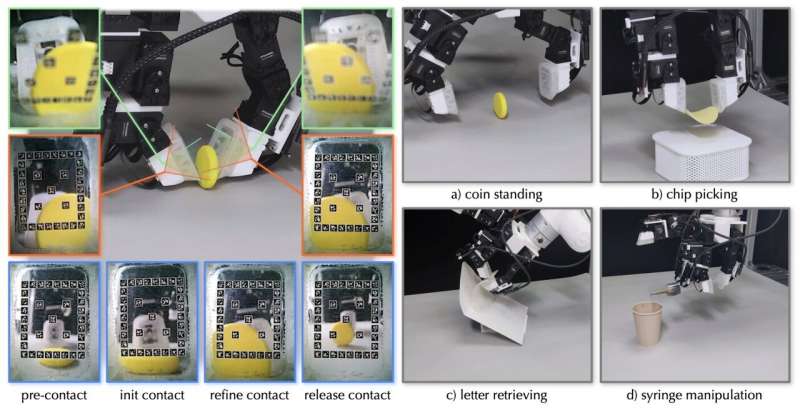
FingerEye-yə ümumi baxış və imkanlar. Solda: FingerEye qarşılıqlı təsirin bütün mərhələlərində davamlı görmə-toxunma qavrayışı təmin edir. Təmasdan əvvəl, binokulyar RGB kameralar barmaq ucunun yerini müəyyən etmək üçün yaxın məsafəli vizual işarələr və gizli stereo dərinlik təmin edir. Təmas zamanı xarici qüvvələr və fırlanma momentləri uyğun halqa strukturunu deformasiya edir; marker əsaslı poza qiymətləndirməsi bu deformasiyaları təmasın monitorinqi və idarə olunması üçün təmas açarı siqnallarına çevirir. Sağda: Çip yığma (sərt, incə), Sikkə Dayandırma (sərt, təmas həssas), Hərf Çıxarma (deformasiya edilə bilən, nazik qabıqlı) və Şpris Manipulyasiyası (ifrazatlı, funksional) daxil olmaqla müxtəlif obyekt xüsusiyyətlərini və qarşılıqlı təsir rejimlərini əhatə edən real qiymətləndirmə tapşırıqları. Müəllif: Xu və başqaları.
Müxtəlif əl işlərini etibarlı şəkildə yerinə yetirmək üçün robotlar evlərdə tapılan əşyalardan tutmuş müəyyən peşəkar mühitlərdə istifadə olunan alətlərə qədər müxtəlif əşyaları idarə edə bilməlidirlər. Mövcud robot sistemlərinin çoxu artıq əşyaları götürmək və müəyyən bir yerə aparmaq kimi əsas əl işlərini yerinə yetirə bilsə də, əksər sistemlər hələ də əşyaların çevik şəkildə manipulyasiyasını tələb edən tapşırıqlarla mübarizə aparır.
“Çevik manipulyasiya” termini, insanların gündəlik olaraq həll etdiyi bir çox vəzifənin yerinə yetirilməsi üçün əsas olan obyektləri məharətlə və dəqiq şəkildə hərəkət etdirmək qabiliyyətini təsvir edir. Bu qabiliyyəti robotlarda təkrarlamaq çox çətin ola bilər, çünki bu, adətən müxtəlif növ sensor məlumatların toplanmasını və şərh edilməsini tələb edir.
Robot manipulyasiyası üçün ənənəvi yanaşmalar kameralar və toxunma məlumatlarını qəbul edən cihazlar kimi vizual sensorlara əsaslanır. Lakin mövcud toxunma sensorlarının əksəriyyəti yalnız robot bir obyektə toxunduqdan sonra geribildirim təmin edir ki, bu da manipulyasiya strategiyalarını əvvəlcədən planlaşdırmağı çətinləşdirir.
Sinqapur Milli Universiteti və RoboScience tədqiqatçıları bu yaxınlarda vizual və toxunma məlumatlarının fasiləsiz axınını toplayan FingerEye sensoru hazırladılar. arXiv preprint serverində dərc olunmuş məqalədə təqdim edilən yeni sensor robotların uyğunlaşma qabiliyyətini və cavabdehliyini artıra bilər və onlara daha mürəkkəb manipulyasiya tapşırıqlarını yerinə yetirməyə imkan verə bilər.
Zhixuan Xu, Yuchen Li və həmkarları öz məqalələrində yazırdılar ki, “Çevik robot manipulyasiyası qarşılıqlı əlaqənin bütün mərhələlərində: təmasdan əvvəl, təmasın başlanğıcı və təmasdan sonrakı mərhələlərdə hərtərəfli qavrayış tələb edir.” “Belə davamlı geribildirim robotun qarşılıqlı əlaqə zamanı hərəkətlərini uyğunlaşdırmasına imkan verir. Lakin, GelSight və onun variantları kimi bir çox mövcud toxunma sensorları yalnız təmas qurulduqdan sonra geribildirim təmin edir və bu da robotun təması dəqiq başlatmaq qabiliyyətini məhdudlaşdırır.”Oyna
00:0000:00SəssizParametrlərPIPTam ekrana daxil olun
OynaXülasə Videosu. Kredit: FingerEye
FingerEye: Yeni görmə-toxunma sensoru
Xu, Li və həmkarları tərəfindən hazırlanmış yeni sensor olan FingerEye iki kiçik rəngli kamera və yumşaq halqa quruluşunu birləşdirir. Kiçik kameralar davamlı olaraq obyektləri çəkir və iki baxış nöqtəsi arasındakı məsafəni təxmin edərək insan dərinliyi qavrayışını təqlid edir.
Digər tərəfdən, halqa quruluşu robot cisimlərə toxunduqda deformasiyaya uğrayır. Daha sonra onun deformasiyası tətbiq olunan qüvvələri və yaxınlıqdakı hərəkətləri müəyyən etmək üçün istifadə olunur.
Müəlliflər yazırdılar ki, “FingerEye, yaxın məsafəli vizual qavrayışı gizli stereo dərinliklə təmin etmək üçün binokulyar RGB kameraları birləşdirir. Təmas zamanı xarici qüvvələr və fırlanma momentləri uyğun halqa strukturunu deformasiya edir; bu deformasiyalar marker əsaslı poza qiymətləndirməsi ilə qeydə alınır və təmas açarı sensoru üçün proksi kimi xidmət edir.”
Tədqiqatçılar tərəfindən hazırlanmış sensor həm kompakt, həm də qənaətcildir. Üstəlik, onun unikal dizaynı robot yaxınlıqdakı obyektlərlə qarşılıqlı əlaqədə olarkən vizual və toxunma məlumatlarının fasiləsiz axınını toplamağa imkan verir.Oyna
00:0000:00SəssizParametrlərPIPTam ekrana daxil olun
OynaEksantrik Qüvvə Duyğusu. Kredit: FingerEye
Xu, Li və həmkarları yazırdılar ki, “Bu dizayn təmasdan əvvəlki vizual siqnallardan təmasdan sonrakı toxunma reaksiyasına rəvan keçid edən qavrayış axınına imkan verir. Bu hissetmə qabiliyyətinə əsaslanaraq, məhdud real dünya məlumatlarından çevik manipulyasiya davranışlarını öyrənmək üçün birdən çox FingerEye sensorundan gələn siqnalları birləşdirən görmə-toxunma təqlidi öyrənmə siyasəti hazırlayırıq.”
Xu, Li və həmkarları öz məqalələrində FingerEye sensoru tərəfindən toplanan məlumatlara əsaslanaraq çevik manipulyasiya strategiyalarının planlaşdırılmasına imkan verən təqlid öyrənmə siyasətini təqdim etdilər. Bundan əlavə, onlar sensorlarının virtual replikasını (yəni rəqəmsal əkizini) və müxtəlif tapşırıqlar üzrə robotların bacarıqlarını dəqiq tənzimləmək üçün istifadə edilə bilən bir platforma yaratdılar.
İlkin nəticələr və real tətbiqlər
Tədqiqatçılar sensorlarını həm simulyasiyalarda, həm də real təcrübələrdə sınaqdan keçirdilər, burada onu robot tutucularına inteqrasiya etdilər və müxtəlif manipulyasiya tapşırıqlarını yerinə yetirmək qabiliyyətlərini sınaqdan keçirdilər. Nəticələri çox ümidverici idi, çünki sensor robotlara obyektləri toxunmadan əvvəl, toxunarkən və sonra qavramağa imkan verirdi və bu da daha effektiv manipulyasiya strategiyaları ilə nəticələnirdi.
Sensorun unikal dizaynı və əlaqəli proqramlaşdırma kodu açıq mənbəlidir və GitHub-da əldə edilə bilər . Digər tədqiqatçılar tezliklə həm vizual, həm də toxunma məlumatları toplayan digər sensorlar hazırlamaq üçün komandanın işindən ilham ala bilərlər.Oyna
00:0000:00SəssizParametrlərPIPTam ekrana daxil olun
OynaFingerEye ilə çevik manipulyasiya bacarıqlarını öyrənmək. Sikkə duruşunda. Kredit: FingerEye
Müəlliflər yazırdılar ki, “Təsvir öyrənməsi üçün real nümayişləri vizual olaraq artırılmış simulyasiya edilmiş müşahidələrlə birləşdirməklə, öyrənilən siyasətlər obyektin görünüşünün dəyişməsinə qarşı daha möhkəm olur. Birlikdə, bu dizayn aspektləri sikkələrin yerləşdirilməsi, çiplərin seçilməsi, hərflərin çıxarılması və şpris manipulyasiyası da daxil olmaqla müxtəlif obyekt xüsusiyyətləri və qarşılıqlı təsir rejimləri arasında çevik manipulyasiya etməyə imkan verir.”
FingerEye sensoru tezliklə daha da təkmilləşdirilə və daha geniş təcrübələrdə sınaqdan keçirilə bilər. Gələcəkdə bu, ev şəraitində, peşəkar şəraitdə və səhiyyə müəssisələrində müxtəlif əl işlərini etibarlı şəkildə yerinə yetirə bilən daha adaptiv robotların, eləcə də xidmət və sənaye robotlarının hazırlanmasına imkan verə bilər.
Müəllifimiz İnqrid Fadelli tərəfindən sizin üçün yazılmış, Qeb Klark tərəfindən redaktə edilmiş və Robert İqan tərəfindən faktlar yoxlanılmış və nəzərdən keçirilmiş bu məqalə diqqətli insan əməyinin nəticəsidir. Müstəqil elmi jurnalistikanı yaşatmaq üçün sizin kimi oxuculara güvənirik. Əgər bu reportaj sizin üçün vacibdirsə, xahiş edirik ianə etməyi (xüsusilə aylıq) nəzərdən keçirin. Təşəkkür olaraq reklamsız hesab əldə edəcəksiniz .